Class defining the state transition table behavior for the LCIStrategic Strategic Plugin. More...
#include <lci_state_transition_table.hpp>
Public Types | |
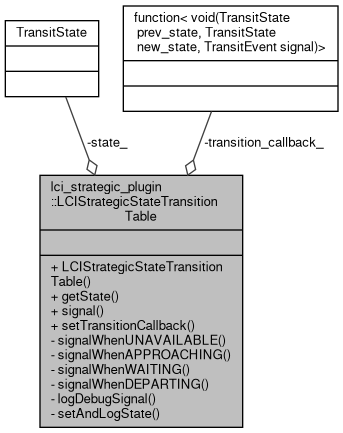
| using | TransitionCallback = std::function< void(TransitState prev_state, TransitState new_state, TransitEvent signal)> |
Public Member Functions | |
| LCIStrategicStateTransitionTable ()=default | |
| Default Constructor. More... | |
| TransitState | getState () const |
| Returns the current state. More... | |
| void | signal (TransitEvent signal) |
| Trigger signal for the transition table. More... | |
| void | setTransitionCallback (TransitionCallback cb) |
| Callback setting function. The provided callback will be triggered any time the current state changes to a new state. More... | |
Private Member Functions | |
| void | signalWhenUNAVAILABLE (TransitEvent signal) |
| void | signalWhenAPPROACHING (TransitEvent signal) |
| void | signalWhenWAITING (TransitEvent signal) |
| void | signalWhenDEPARTING (TransitEvent signal) |
| void | logDebugSignal (TransitEvent signal) const |
| Helper function for logging the provide signal. More... | |
| void | setAndLogState (TransitState new_state, TransitEvent source_signal) |
| Function to change the current state and log the details of the transition. More... | |
Private Attributes | |
| TransitState | state_ = TransitState::UNAVAILABLE |
| Current state. This state should only ever be set using the setAndLogState() function. More... | |
| TransitionCallback | transition_callback_ |
Detailed Description
Class defining the state transition table behavior for the LCIStrategic Strategic Plugin.
Definition at line 25 of file lci_state_transition_table.hpp.
Member Typedef Documentation
◆ TransitionCallback
| using lci_strategic_plugin::LCIStrategicStateTransitionTable::TransitionCallback = std::function<void(TransitState prev_state, TransitState new_state, TransitEvent signal)> |
Definition at line 28 of file lci_state_transition_table.hpp.
Constructor & Destructor Documentation
◆ LCIStrategicStateTransitionTable()
|
default |
Default Constructor.
Member Function Documentation
◆ getState()
| TransitState lci_strategic_plugin::LCIStrategicStateTransitionTable::getState | ( | ) | const |
Returns the current state.
- Returns
- Current state
Definition at line 29 of file lci_state_transition_table.cpp.
References state_.
Referenced by lci_strategic_plugin::LCIStrategicPlugin::plan_maneuvers_callback().
◆ logDebugSignal()
|
private |
Helper function for logging the provide signal.
- Parameters
-
signal The signal to be logged
Definition at line 118 of file lci_state_transition_table.cpp.
References signal(), and state_.
Referenced by signalWhenAPPROACHING(), signalWhenDEPARTING(), signalWhenUNAVAILABLE(), and signalWhenWAITING().
◆ setAndLogState()
|
private |
Function to change the current state and log the details of the transition.
- Parameters
-
new_state The state to set. source_signal The signal which caused the new_state to be set
Definition at line 124 of file lci_state_transition_table.cpp.
References state_, and transition_callback_.
Referenced by signalWhenAPPROACHING(), signalWhenDEPARTING(), signalWhenUNAVAILABLE(), and signalWhenWAITING().
◆ setTransitionCallback()
| void lci_strategic_plugin::LCIStrategicStateTransitionTable::setTransitionCallback | ( | TransitionCallback | cb | ) |
Callback setting function. The provided callback will be triggered any time the current state changes to a new state.
- Parameters
-
cb The callback function which will be provided with the previous state, new current state, and the signal which caused the transition.
Definition at line 59 of file lci_state_transition_table.cpp.
References transition_callback_.
◆ signal()
| void lci_strategic_plugin::LCIStrategicStateTransitionTable::signal | ( | TransitEvent | signal | ) |
Trigger signal for the transition table.
- Parameters
-
signal The signal for the transition table to evaluate
Definition at line 34 of file lci_state_transition_table.cpp.
References lci_strategic_plugin::APPROACHING, lci_strategic_plugin::DEPARTING, signal(), signalWhenAPPROACHING(), signalWhenDEPARTING(), signalWhenUNAVAILABLE(), signalWhenWAITING(), state_, lci_strategic_plugin::UNAVAILABLE, and lci_strategic_plugin::WAITING.
Referenced by logDebugSignal(), lci_strategic_plugin::LCIStrategicPlugin::planWhenAPPROACHING(), lci_strategic_plugin::LCIStrategicPlugin::planWhenDEPARTING(), lci_strategic_plugin::LCIStrategicPlugin::planWhenUNAVAILABLE(), lci_strategic_plugin::LCIStrategicPlugin::planWhenWAITING(), signal(), signalWhenAPPROACHING(), signalWhenDEPARTING(), signalWhenUNAVAILABLE(), and signalWhenWAITING().
◆ signalWhenAPPROACHING()
|
private |
Definition at line 76 of file lci_state_transition_table.cpp.
References lci_strategic_plugin::CROSSED_STOP_BAR, lci_strategic_plugin::DEPARTING, logDebugSignal(), setAndLogState(), signal(), lci_strategic_plugin::STOPPED, and lci_strategic_plugin::WAITING.
Referenced by signal().
◆ signalWhenDEPARTING()
|
private |
Definition at line 106 of file lci_state_transition_table.cpp.
References lci_strategic_plugin::INTERSECTION_EXIT, logDebugSignal(), setAndLogState(), signal(), and lci_strategic_plugin::UNAVAILABLE.
Referenced by signal().
◆ signalWhenUNAVAILABLE()
|
private |
Definition at line 64 of file lci_state_transition_table.cpp.
References lci_strategic_plugin::APPROACHING, lci_strategic_plugin::IN_STOPPING_RANGE, logDebugSignal(), setAndLogState(), and signal().
Referenced by signal().
◆ signalWhenWAITING()
|
private |
Definition at line 94 of file lci_state_transition_table.cpp.
References lci_strategic_plugin::DEPARTING, logDebugSignal(), lci_strategic_plugin::RED_TO_GREEN_LIGHT, setAndLogState(), and signal().
Referenced by signal().
Member Data Documentation
◆ state_
|
private |
Current state. This state should only ever be set using the setAndLogState() function.
Definition at line 59 of file lci_state_transition_table.hpp.
Referenced by getState(), logDebugSignal(), setAndLogState(), and signal().
◆ transition_callback_
|
private |
Definition at line 61 of file lci_state_transition_table.hpp.
Referenced by setAndLogState(), and setTransitionCallback().
The documentation for this class was generated from the following files:
- lci_strategic_plugin/include/lci_strategic_plugin/lci_state_transition_table.hpp
- lci_strategic_plugin/src/lci_state_transition_table.cpp