functor_filter.h File Reference
#include <pcl/filters/filter_indices.h>#include <pcl/point_traits.h>#include <limits>#include "types.h"
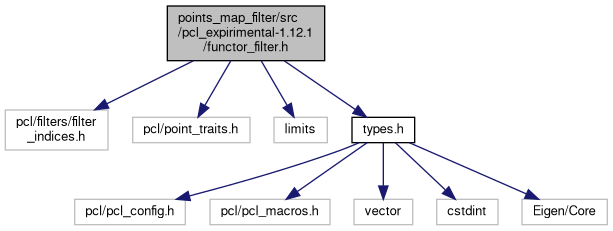
Include dependency graph for functor_filter.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | pcl::experimental::advanced::FunctorFilter< PointT, FunctionObject > |
| Filter point clouds and indices based on a function object passed in the ctor. More... | |
Namespaces | |
| namespace | pcl |
| namespace | pcl::experimental |
| namespace | pcl::experimental::advanced |
Typedefs | |
| template<class PointT > | |
| using | pcl::experimental::FilterFunction = std::function< bool(const PointCloud< PointT > &, index_t)> |
| template<class PointT > | |
| using | pcl::experimental::FunctionFilter = advanced::FunctorFilter< PointT, FilterFunction< PointT > > |
Variables | |
| template<typename PointT , typename Function > | |
| static constexpr bool | pcl::experimental::is_function_object_for_filter_v |
Checks if the function object meets the usage in FunctorFilter class. More... | |