helper.cpp File Reference
#include "ros/ros.h"#include <cav_srvs/PlanTrajectory.h>
Include dependency graph for helper.cpp:
Go to the source code of this file.
Functions | |
| bool | callback (cav_srvs::PlanTrajectory::Request &req, cav_srvs::PlanTrajectory::Response &res) |
| int | main (int argc, char **argv) |
Function Documentation
◆ callback()
| bool callback | ( | cav_srvs::PlanTrajectory::Request & | req, |
| cav_srvs::PlanTrajectory::Response & | res | ||
| ) |
Definition at line 21 of file helper.cpp.
23{
24 if (req.initial_trajectory_plan.trajectory_id == "YieldReq"){
25 res.trajectory_plan.trajectory_id = "YieldResp";
26 }
27 ROS_ERROR("Yield callback");
28 return true;
29}
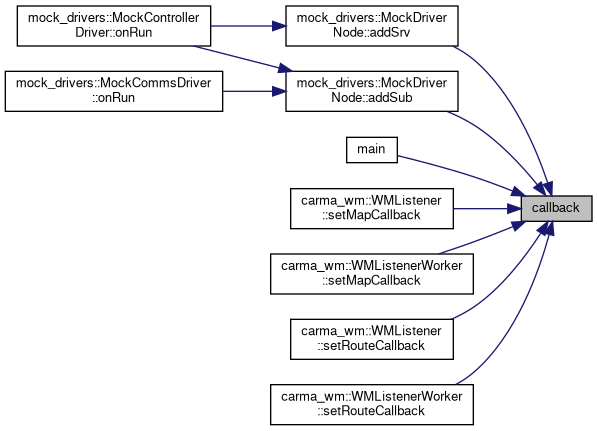
Referenced by main(), carma_wm::WMListener::setMapCallback(), carma_wm::WMListenerWorker::setMapCallback(), carma_wm::WMListener::setRouteCallback(), and carma_wm::WMListenerWorker::setRouteCallback().
Here is the caller graph for this function:
◆ main()
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 32 of file helper.cpp.
33{
34 ros::init(argc, argv, "helper");
35 ros::NodeHandle n;
36
38 ros::spin();
39 ros::Duration(5).sleep();
40
41 return 0;
42}
bool callback(cav_srvs::PlanTrajectory::Request &req, cav_srvs::PlanTrajectory::Response &res)
Definition: helper.cpp:21
References callback().
Here is the call graph for this function:
