approaching_emergency_vehicle_plugin::anonymous_namespace{approaching_emergency_vehicle_plugin_node.cpp} Namespace Reference
Functions | |
| double | getManeuverEndSpeed (const carma_planning_msgs::msg::Maneuver &mvr) |
| Anonymous function to extract maneuver end speed which cannot be obtained with GET_MANEUVER_PROPERY calls due to it missing in stop and wait plugin. More... | |
Function Documentation
◆ getManeuverEndSpeed()
| double approaching_emergency_vehicle_plugin::anonymous_namespace{approaching_emergency_vehicle_plugin_node.cpp}::getManeuverEndSpeed | ( | const carma_planning_msgs::msg::Maneuver & | mvr | ) |
Anonymous function to extract maneuver end speed which cannot be obtained with GET_MANEUVER_PROPERY calls due to it missing in stop and wait plugin.
Definition at line 27 of file approaching_emergency_vehicle_plugin_node.cpp.
27 {
28 switch(mvr.type) {
29 case carma_planning_msgs::msg::Maneuver::LANE_FOLLOWING:
30 return mvr.lane_following_maneuver.end_speed;
31 case carma_planning_msgs::msg::Maneuver::LANE_CHANGE:
32 return mvr.lane_change_maneuver.end_speed;
33 case carma_planning_msgs::msg::Maneuver::STOP_AND_WAIT:
34 return 0;
35 default:
36 return 0;
37 }
38 }
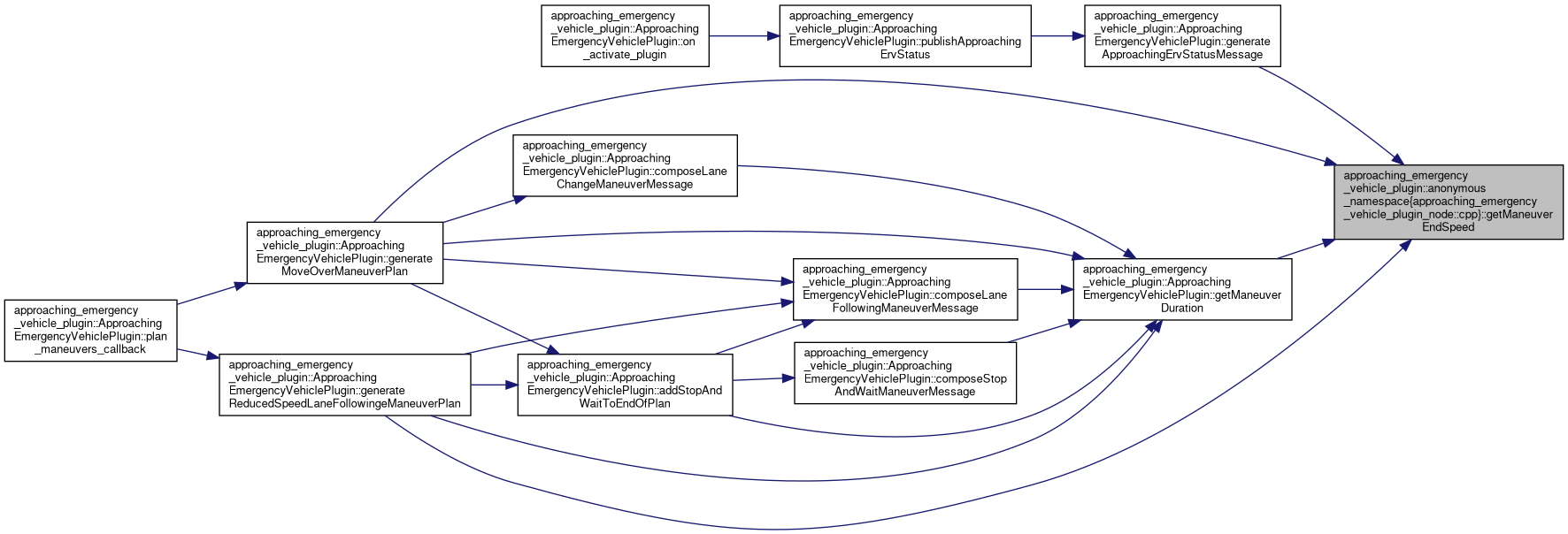
Referenced by approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::generateApproachingErvStatusMessage(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::generateMoveOverManeuverPlan(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::generateReducedSpeedLaneFollowingeManeuverPlan(), and approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::getManeuverDuration().
Here is the caller graph for this function: