Functions | |
| rclcpp::Time | get_plan_start_time (const carma_planning_msgs::msg::ManeuverPlan &) |
| Get the start time of the first maneuver in the plan. More... | |
| double | get_plan_start_distance (const carma_planning_msgs::msg::ManeuverPlan &) |
| Get the start distance of the first maneuver in the plan. More... | |
| rclcpp::Time | get_plan_end_time (const carma_planning_msgs::msg::ManeuverPlan &) |
| Get the end time of the first maneuver in the plan. More... | |
| double | get_plan_end_distance (const carma_planning_msgs::msg::ManeuverPlan &) |
| Get the end distance of the first maneuver in the plan. More... | |
| rclcpp::Time | get_maneuver_start_time (const carma_planning_msgs::msg::Maneuver &) |
| Get the start time of the specified maneuver. More... | |
| double | get_maneuver_start_distance (const carma_planning_msgs::msg::Maneuver &) |
| Get the start distance the specified maneuver. More... | |
| rclcpp::Time | get_maneuver_end_time (const carma_planning_msgs::msg::Maneuver &) |
| Get the end time of the specified maneuver. More... | |
| double | get_maneuver_end_distance (const carma_planning_msgs::msg::Maneuver &) |
| Get the end distance of the specified maneuver. More... | |
Function Documentation
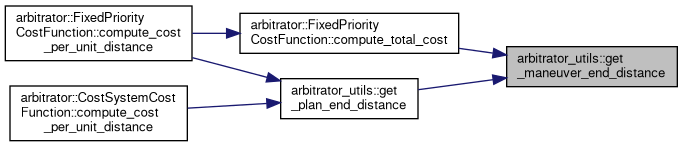
◆ get_maneuver_end_distance()
| double arbitrator_utils::get_maneuver_end_distance | ( | const carma_planning_msgs::msg::Maneuver & | mvr | ) |
Get the end distance of the specified maneuver.
- Parameters
-
mvr The maneuver to examine
- Returns
- The double-valued linear downtrack distance in meters to the end of the maneuver
- Exceptions
-
An invalid argument exception if the maneuver is poorly constructed
Definition at line 79 of file arbitrator_utils.cpp.
References GET_MANEUVER_PROPERTY.
Referenced by arbitrator::FixedPriorityCostFunction::compute_total_cost(), and get_plan_end_distance().
◆ get_maneuver_end_time()
| rclcpp::Time arbitrator_utils::get_maneuver_end_time | ( | const carma_planning_msgs::msg::Maneuver & | mvr | ) |
Get the end time of the specified maneuver.
- Parameters
-
mvr The maneuver to examine
- Returns
- The rclcpp::Time at which it ends
- Exceptions
-
An invalid argument exception if the maneuver is poorly constructed
Definition at line 69 of file arbitrator_utils.cpp.
References GET_MANEUVER_PROPERTY.
Referenced by get_plan_end_time().

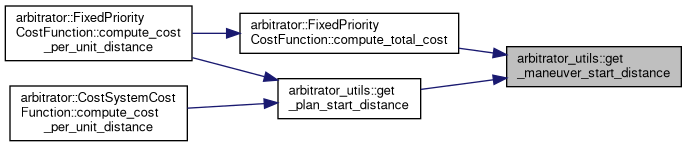
◆ get_maneuver_start_distance()
| double arbitrator_utils::get_maneuver_start_distance | ( | const carma_planning_msgs::msg::Maneuver & | mvr | ) |
Get the start distance the specified maneuver.
- Parameters
-
mvr The maneuver to examine
- Returns
- The double-valued linear downtrack distance in meters to the start of the maneuver
- Exceptions
-
An invalid argument exception if the maneuver is poorly constructed
Definition at line 84 of file arbitrator_utils.cpp.
References GET_MANEUVER_PROPERTY.
Referenced by arbitrator::FixedPriorityCostFunction::compute_total_cost(), and get_plan_start_distance().
◆ get_maneuver_start_time()
| rclcpp::Time arbitrator_utils::get_maneuver_start_time | ( | const carma_planning_msgs::msg::Maneuver & | mvr | ) |
Get the start time of the specified maneuver.
- Parameters
-
mvr The maneuver to examine
- Returns
- The rclcpp::Time at which it starts
- Exceptions
-
An invalid argument exception if the maneuver is poorly constructed
Definition at line 74 of file arbitrator_utils.cpp.
References GET_MANEUVER_PROPERTY.
Referenced by get_plan_start_time().

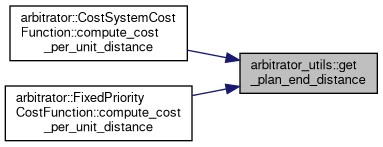
◆ get_plan_end_distance()
| double arbitrator_utils::get_plan_end_distance | ( | const carma_planning_msgs::msg::ManeuverPlan & | plan | ) |
Get the end distance of the first maneuver in the plan.
- Parameters
-
plan The plan to examine
- Returns
- The double-valued linear downtrack distance in meters to the end of the plan
- Exceptions
-
An invalid argument exception if the plan is empty
Definition at line 36 of file arbitrator_utils.cpp.
References get_maneuver_end_distance().
Referenced by arbitrator::CostSystemCostFunction::compute_cost_per_unit_distance(), and arbitrator::FixedPriorityCostFunction::compute_cost_per_unit_distance().

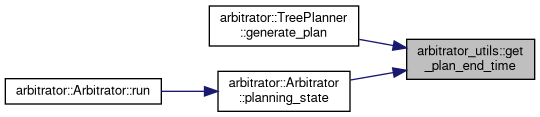
◆ get_plan_end_time()
| rclcpp::Time arbitrator_utils::get_plan_end_time | ( | const carma_planning_msgs::msg::ManeuverPlan & | plan | ) |
Get the end time of the first maneuver in the plan.
- Parameters
-
plan The plan to examine
- Returns
- The rclcpp::Time at which it ends
- Exceptions
-
An invalid argument exception if the plan is empty
Definition at line 24 of file arbitrator_utils.cpp.
References get_maneuver_end_time().
Referenced by arbitrator::TreePlanner::generate_plan(), and arbitrator::Arbitrator::planning_state().

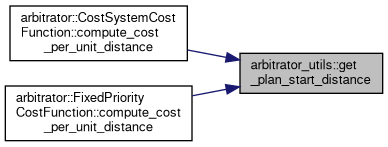
◆ get_plan_start_distance()
| double arbitrator_utils::get_plan_start_distance | ( | const carma_planning_msgs::msg::ManeuverPlan & | plan | ) |
Get the start distance of the first maneuver in the plan.
- Parameters
-
plan The plan to examine
- Returns
- The double-valued linear downtrack distance in meters to the start of the plan
- Exceptions
-
An invalid argument exception if the plan is empty
Definition at line 58 of file arbitrator_utils.cpp.
References get_maneuver_start_distance().
Referenced by arbitrator::CostSystemCostFunction::compute_cost_per_unit_distance(), and arbitrator::FixedPriorityCostFunction::compute_cost_per_unit_distance().

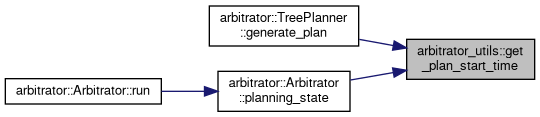
◆ get_plan_start_time()
| rclcpp::Time arbitrator_utils::get_plan_start_time | ( | const carma_planning_msgs::msg::ManeuverPlan & | plan | ) |
Get the start time of the first maneuver in the plan.
- Parameters
-
plan The plan to examine
- Returns
- The rclcpp::Time at which it starts
- Exceptions
-
An invalid argument exception if the plan is empty
Definition at line 47 of file arbitrator_utils.cpp.
References get_maneuver_start_time().
Referenced by arbitrator::TreePlanner::generate_plan(), and arbitrator::Arbitrator::planning_state().