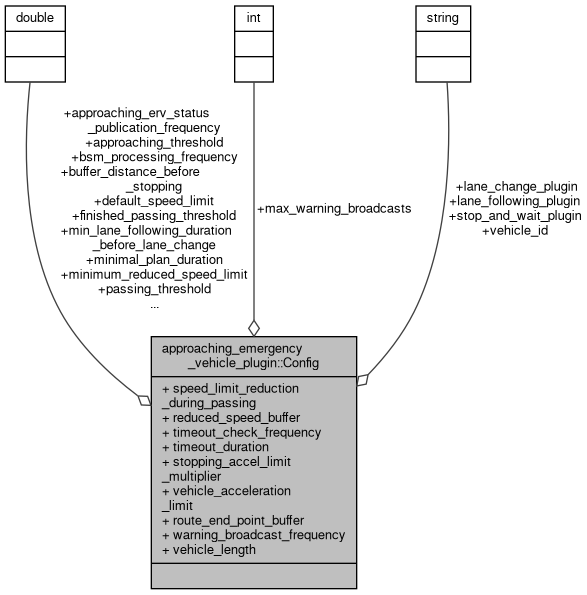
Stuct containing the algorithm configuration values for approaching_emergency_vehicle_plugin. More...
#include <approaching_emergency_vehicle_plugin_config.hpp>
Friends | |
| std::ostream & | operator<< (std::ostream &output, const Config &c) |
Detailed Description
Stuct containing the algorithm configuration values for approaching_emergency_vehicle_plugin.
Definition at line 28 of file approaching_emergency_vehicle_plugin_config.hpp.
Friends And Related Function Documentation
◆ operator<<
|
friend |
Definition at line 92 of file approaching_emergency_vehicle_plugin_config.hpp.
Member Data Documentation
◆ approaching_erv_status_publication_frequency
| double approaching_emergency_vehicle_plugin::Config::approaching_erv_status_publication_frequency = 1.0 |
Definition at line 72 of file approaching_emergency_vehicle_plugin_config.hpp.
Referenced by approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::ApproachingEmergencyVehiclePlugin(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::on_activate_plugin(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::on_configure_plugin(), and approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::parameter_update_callback().
◆ approaching_threshold
| double approaching_emergency_vehicle_plugin::Config::approaching_threshold = 60.0 |
Definition at line 33 of file approaching_emergency_vehicle_plugin_config.hpp.
Referenced by approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::ApproachingEmergencyVehiclePlugin(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::generateApproachingErvStatusMessage(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::on_configure_plugin(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::parameter_update_callback(), and approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::plan_maneuvers_callback().
◆ bsm_processing_frequency
| double approaching_emergency_vehicle_plugin::Config::bsm_processing_frequency = 1.0 |
Definition at line 42 of file approaching_emergency_vehicle_plugin_config.hpp.
Referenced by approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::ApproachingEmergencyVehiclePlugin(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::incomingBsmCallback(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::on_configure_plugin(), and approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::parameter_update_callback().
◆ buffer_distance_before_stopping
| double approaching_emergency_vehicle_plugin::Config::buffer_distance_before_stopping = 45.0 |
Definition at line 63 of file approaching_emergency_vehicle_plugin_config.hpp.
Referenced by approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::ApproachingEmergencyVehiclePlugin(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::addStopAndWaitToEndOfPlan(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::on_configure_plugin(), and approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::parameter_update_callback().
◆ default_speed_limit
| double approaching_emergency_vehicle_plugin::Config::default_speed_limit = 2.2352 |
Definition at line 50 of file approaching_emergency_vehicle_plugin_config.hpp.
Referenced by approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::ApproachingEmergencyVehiclePlugin(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::getLaneletSpeedLimit(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::on_configure_plugin(), and approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::parameter_update_callback().
◆ finished_passing_threshold
| double approaching_emergency_vehicle_plugin::Config::finished_passing_threshold = 152.4 |
Definition at line 36 of file approaching_emergency_vehicle_plugin_config.hpp.
Referenced by approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::ApproachingEmergencyVehiclePlugin(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::getSecondsUntilPassing(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::on_configure_plugin(), and approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::parameter_update_callback().
◆ lane_change_plugin
| std::string approaching_emergency_vehicle_plugin::Config::lane_change_plugin = "cooperative_lanechange" |
Definition at line 85 of file approaching_emergency_vehicle_plugin_config.hpp.
Referenced by approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::ApproachingEmergencyVehiclePlugin(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::composeLaneChangeManeuverMessage(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::on_configure_plugin(), and approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::parameter_update_callback().
◆ lane_following_plugin
| std::string approaching_emergency_vehicle_plugin::Config::lane_following_plugin = "inlanecruising_plugin" |
Definition at line 83 of file approaching_emergency_vehicle_plugin_config.hpp.
Referenced by approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::ApproachingEmergencyVehiclePlugin(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::composeLaneFollowingManeuverMessage(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::on_configure_plugin(), and approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::parameter_update_callback().
◆ max_warning_broadcasts
| int approaching_emergency_vehicle_plugin::Config::max_warning_broadcasts = 5 |
Definition at line 78 of file approaching_emergency_vehicle_plugin_config.hpp.
Referenced by approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::ApproachingEmergencyVehiclePlugin(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::broadcastWarningToErv(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::on_configure_plugin(), and approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::parameter_update_callback().
◆ min_lane_following_duration_before_lane_change
| double approaching_emergency_vehicle_plugin::Config::min_lane_following_duration_before_lane_change = 3.0 |
Definition at line 39 of file approaching_emergency_vehicle_plugin_config.hpp.
Referenced by approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::ApproachingEmergencyVehiclePlugin(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::generateMoveOverManeuverPlan(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::on_configure_plugin(), and approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::parameter_update_callback().
◆ minimal_plan_duration
| double approaching_emergency_vehicle_plugin::Config::minimal_plan_duration = 15.0 |
Definition at line 61 of file approaching_emergency_vehicle_plugin_config.hpp.
Referenced by approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::ApproachingEmergencyVehiclePlugin(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::generateMoveOverManeuverPlan(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::generateReducedSpeedLaneFollowingeManeuverPlan(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::on_configure_plugin(), and approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::parameter_update_callback().
◆ minimum_reduced_speed_limit
| double approaching_emergency_vehicle_plugin::Config::minimum_reduced_speed_limit = 2.2352 |
Definition at line 47 of file approaching_emergency_vehicle_plugin_config.hpp.
Referenced by approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::ApproachingEmergencyVehiclePlugin(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::generateReducedSpeedLaneFollowingeManeuverPlan(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::on_configure_plugin(), and approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::parameter_update_callback().
◆ passing_threshold
| double approaching_emergency_vehicle_plugin::Config::passing_threshold = 15.0 |
Definition at line 30 of file approaching_emergency_vehicle_plugin_config.hpp.
Referenced by approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::ApproachingEmergencyVehiclePlugin(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::on_configure_plugin(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::parameter_update_callback(), and approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::plan_maneuvers_callback().
◆ reduced_speed_buffer
| double approaching_emergency_vehicle_plugin::Config::reduced_speed_buffer = 1.1176 |
Definition at line 52 of file approaching_emergency_vehicle_plugin_config.hpp.
Referenced by approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::ApproachingEmergencyVehiclePlugin(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::generateApproachingErvStatusMessage(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::on_configure_plugin(), and approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::parameter_update_callback().
◆ route_end_point_buffer
| double approaching_emergency_vehicle_plugin::Config::route_end_point_buffer = 10.0 |
Definition at line 70 of file approaching_emergency_vehicle_plugin_config.hpp.
Referenced by approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::ApproachingEmergencyVehiclePlugin(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::composeStopAndWaitManeuverMessage(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::on_configure_plugin(), and approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::parameter_update_callback().
◆ speed_limit_reduction_during_passing
| double approaching_emergency_vehicle_plugin::Config::speed_limit_reduction_during_passing = 4.4704 |
Definition at line 44 of file approaching_emergency_vehicle_plugin_config.hpp.
Referenced by approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::ApproachingEmergencyVehiclePlugin(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::generateReducedSpeedLaneFollowingeManeuverPlan(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::on_configure_plugin(), and approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::parameter_update_callback().
◆ stop_and_wait_plugin
| std::string approaching_emergency_vehicle_plugin::Config::stop_and_wait_plugin = "stop_and_wait_plugin" |
Definition at line 87 of file approaching_emergency_vehicle_plugin_config.hpp.
Referenced by approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::composeStopAndWaitManeuverMessage(), and approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::parameter_update_callback().
◆ stopping_accel_limit_multiplier
| double approaching_emergency_vehicle_plugin::Config::stopping_accel_limit_multiplier = 0.5 |
Definition at line 65 of file approaching_emergency_vehicle_plugin_config.hpp.
Referenced by approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::ApproachingEmergencyVehiclePlugin(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::generateMoveOverManeuverPlan(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::generateReducedSpeedLaneFollowingeManeuverPlan(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::on_configure_plugin(), and approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::parameter_update_callback().
◆ timeout_check_frequency
| double approaching_emergency_vehicle_plugin::Config::timeout_check_frequency = 2.0 |
Definition at line 55 of file approaching_emergency_vehicle_plugin_config.hpp.
Referenced by approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::ApproachingEmergencyVehiclePlugin(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::on_activate_plugin(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::on_configure_plugin(), and approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::parameter_update_callback().
◆ timeout_duration
| double approaching_emergency_vehicle_plugin::Config::timeout_duration = 5.0 |
Definition at line 58 of file approaching_emergency_vehicle_plugin_config.hpp.
Referenced by approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::ApproachingEmergencyVehiclePlugin(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::checkForErvTimeout(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::on_configure_plugin(), and approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::parameter_update_callback().
◆ vehicle_acceleration_limit
| double approaching_emergency_vehicle_plugin::Config::vehicle_acceleration_limit = 2.0 |
Definition at line 68 of file approaching_emergency_vehicle_plugin_config.hpp.
Referenced by approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::ApproachingEmergencyVehiclePlugin(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::generateMoveOverManeuverPlan(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::generateReducedSpeedLaneFollowingeManeuverPlan(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::on_configure_plugin(), and approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::parameter_update_callback().
◆ vehicle_id
| std::string approaching_emergency_vehicle_plugin::Config::vehicle_id = "DEFAULT_VEHICLE_ID" |
Definition at line 89 of file approaching_emergency_vehicle_plugin_config.hpp.
Referenced by approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::ApproachingEmergencyVehiclePlugin(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::broadcastWarningToErv(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::incomingEmergencyVehicleAckCallback(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::on_configure_plugin(), and approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::parameter_update_callback().
◆ vehicle_length
| double approaching_emergency_vehicle_plugin::Config::vehicle_length = 4.0 |
Definition at line 81 of file approaching_emergency_vehicle_plugin_config.hpp.
Referenced by approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::ApproachingEmergencyVehiclePlugin(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::getSecondsUntilPassing(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::on_configure_plugin(), and approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::parameter_update_callback().
◆ warning_broadcast_frequency
| double approaching_emergency_vehicle_plugin::Config::warning_broadcast_frequency = 1.0 |
Definition at line 75 of file approaching_emergency_vehicle_plugin_config.hpp.
Referenced by approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::ApproachingEmergencyVehiclePlugin(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::on_activate_plugin(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::on_configure_plugin(), and approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::parameter_update_callback().
The documentation for this struct was generated from the following file:
- approaching_emergency_vehicle_plugin/include/approaching_emergency_vehicle_plugin/approaching_emergency_vehicle_plugin_config.hpp