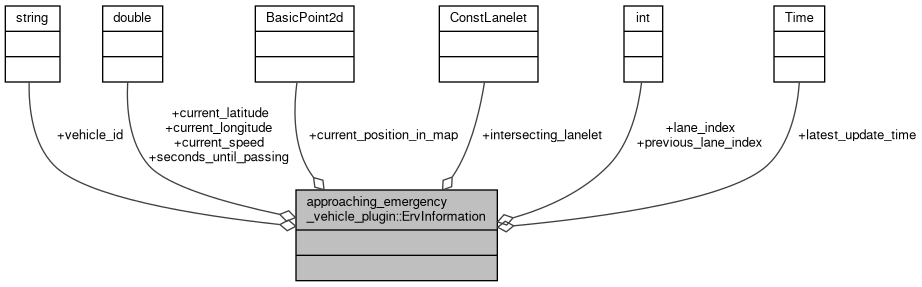
Convenience struct for storing relevant data for an Emergency Response Vehicle (ERV). More...
#include <approaching_emergency_vehicle_plugin_node.hpp>
Public Attributes | |
| std::string | vehicle_id |
| double | current_speed |
| double | current_latitude |
| double | current_longitude |
| lanelet::BasicPoint2d | current_position_in_map |
| lanelet::ConstLanelet | intersecting_lanelet |
| double | seconds_until_passing |
| int | previous_lane_index |
| int | lane_index = 0 |
| rclcpp::Time | latest_update_time |
Detailed Description
Convenience struct for storing relevant data for an Emergency Response Vehicle (ERV).
Definition at line 69 of file approaching_emergency_vehicle_plugin_node.hpp.
Member Data Documentation
◆ current_latitude
| double approaching_emergency_vehicle_plugin::ErvInformation::current_latitude |
Definition at line 72 of file approaching_emergency_vehicle_plugin_node.hpp.
Referenced by approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::getErvInformationFromBsm().
◆ current_longitude
| double approaching_emergency_vehicle_plugin::ErvInformation::current_longitude |
Definition at line 73 of file approaching_emergency_vehicle_plugin_node.hpp.
Referenced by approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::getErvInformationFromBsm().
◆ current_position_in_map
| lanelet::BasicPoint2d approaching_emergency_vehicle_plugin::ErvInformation::current_position_in_map |
Definition at line 74 of file approaching_emergency_vehicle_plugin_node.hpp.
Referenced by approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::getErvInformationFromBsm().
◆ current_speed
| double approaching_emergency_vehicle_plugin::ErvInformation::current_speed |
Definition at line 71 of file approaching_emergency_vehicle_plugin_node.hpp.
Referenced by approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::getErvInformationFromBsm().
◆ intersecting_lanelet
| lanelet::ConstLanelet approaching_emergency_vehicle_plugin::ErvInformation::intersecting_lanelet |
Definition at line 75 of file approaching_emergency_vehicle_plugin_node.hpp.
Referenced by approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::getErvInformationFromBsm().
◆ lane_index
| int approaching_emergency_vehicle_plugin::ErvInformation::lane_index = 0 |
Definition at line 79 of file approaching_emergency_vehicle_plugin_node.hpp.
Referenced by approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::generateApproachingErvStatusMessage(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::getErvInformationFromBsm(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::plan_maneuvers_callback(), and approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::publishHazardLightStatus().
◆ latest_update_time
| rclcpp::Time approaching_emergency_vehicle_plugin::ErvInformation::latest_update_time |
◆ previous_lane_index
| int approaching_emergency_vehicle_plugin::ErvInformation::previous_lane_index |
Definition at line 78 of file approaching_emergency_vehicle_plugin_node.hpp.
Referenced by approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::getErvInformationFromBsm().
◆ seconds_until_passing
| double approaching_emergency_vehicle_plugin::ErvInformation::seconds_until_passing |
Definition at line 76 of file approaching_emergency_vehicle_plugin_node.hpp.
Referenced by approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::generateApproachingErvStatusMessage(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::getErvInformationFromBsm(), and approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::plan_maneuvers_callback().
◆ vehicle_id
| std::string approaching_emergency_vehicle_plugin::ErvInformation::vehicle_id |
Definition at line 70 of file approaching_emergency_vehicle_plugin_node.hpp.
Referenced by approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::broadcastWarningToErv(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::checkForErvTimeout(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::getErvInformationFromBsm(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::incomingBsmCallback(), and approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::incomingEmergencyVehicleAckCallback().
The documentation for this struct was generated from the following file:
- approaching_emergency_vehicle_plugin/include/approaching_emergency_vehicle_plugin/approaching_emergency_vehicle_plugin_node.hpp