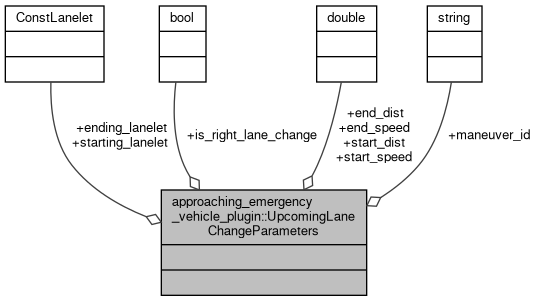
Convenience struct for storing the parameters of an upcoming lane change to ensure that the same parameters are used in separately generated maneuver plans. More...
#include <approaching_emergency_vehicle_plugin_node.hpp>
Public Attributes | |
| lanelet::ConstLanelet | starting_lanelet |
| lanelet::ConstLanelet | ending_lanelet |
| bool | is_right_lane_change |
| double | start_dist |
| double | end_dist |
| double | start_speed |
| double | end_speed |
| std::string | maneuver_id |
Detailed Description
Convenience struct for storing the parameters of an upcoming lane change to ensure that the same parameters are used in separately generated maneuver plans.
Definition at line 90 of file approaching_emergency_vehicle_plugin_node.hpp.
Member Data Documentation
◆ end_dist
| double approaching_emergency_vehicle_plugin::UpcomingLaneChangeParameters::end_dist |
◆ end_speed
| double approaching_emergency_vehicle_plugin::UpcomingLaneChangeParameters::end_speed |
Definition at line 97 of file approaching_emergency_vehicle_plugin_node.hpp.
Referenced by approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::generateMoveOverManeuverPlan().
◆ ending_lanelet
| lanelet::ConstLanelet approaching_emergency_vehicle_plugin::UpcomingLaneChangeParameters::ending_lanelet |
Definition at line 92 of file approaching_emergency_vehicle_plugin_node.hpp.
Referenced by approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::generateMoveOverManeuverPlan().
◆ is_right_lane_change
| bool approaching_emergency_vehicle_plugin::UpcomingLaneChangeParameters::is_right_lane_change |
Definition at line 93 of file approaching_emergency_vehicle_plugin_node.hpp.
Referenced by approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::generateApproachingErvStatusMessage(), and approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::generateMoveOverManeuverPlan().
◆ maneuver_id
| std::string approaching_emergency_vehicle_plugin::UpcomingLaneChangeParameters::maneuver_id |
Definition at line 98 of file approaching_emergency_vehicle_plugin_node.hpp.
Referenced by approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::composeLaneChangeManeuverMessage(), and approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::generateMoveOverManeuverPlan().
◆ start_dist
| double approaching_emergency_vehicle_plugin::UpcomingLaneChangeParameters::start_dist |
◆ start_speed
| double approaching_emergency_vehicle_plugin::UpcomingLaneChangeParameters::start_speed |
Definition at line 96 of file approaching_emergency_vehicle_plugin_node.hpp.
Referenced by approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::generateMoveOverManeuverPlan().
◆ starting_lanelet
| lanelet::ConstLanelet approaching_emergency_vehicle_plugin::UpcomingLaneChangeParameters::starting_lanelet |
Definition at line 91 of file approaching_emergency_vehicle_plugin_node.hpp.
Referenced by approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::generateMoveOverManeuverPlan().
The documentation for this struct was generated from the following file:
- approaching_emergency_vehicle_plugin/include/approaching_emergency_vehicle_plugin/approaching_emergency_vehicle_plugin_node.hpp