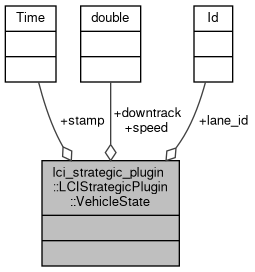
Struct representing a vehicle state for the purposes of planning. More...
Public Attributes | |
| rclcpp::Time | stamp |
| double | downtrack |
| double | speed |
| lanelet::Id | lane_id |
Detailed Description
Struct representing a vehicle state for the purposes of planning.
Definition at line 277 of file lci_strategic_plugin.hpp.
Member Data Documentation
◆ downtrack
| double lci_strategic_plugin::LCIStrategicPlugin::VehicleState::downtrack |
Definition at line 280 of file lci_strategic_plugin.hpp.
Referenced by lci_strategic_plugin::LCIStrategicPlugin::extractInitialState(), lci_strategic_plugin::LCIStrategicPlugin::handleCruisingUntilStop(), lci_strategic_plugin::LCIStrategicPlugin::handleFailureCase(), lci_strategic_plugin::LCIStrategicPlugin::handleGreenSignalScenario(), lci_strategic_plugin::LCIStrategicPlugin::handleStopping(), lci_strategic_plugin::LCIStrategicPlugin::planWhenAPPROACHING(), lci_strategic_plugin::LCIStrategicPlugin::planWhenDEPARTING(), lci_strategic_plugin::LCIStrategicPlugin::planWhenUNAVAILABLE(), and lci_strategic_plugin::LCIStrategicPlugin::planWhenWAITING().
◆ lane_id
| lanelet::Id lci_strategic_plugin::LCIStrategicPlugin::VehicleState::lane_id |
Definition at line 282 of file lci_strategic_plugin.hpp.
Referenced by lci_strategic_plugin::LCIStrategicPlugin::extractInitialState(), and lci_strategic_plugin::LCIStrategicPlugin::planWhenWAITING().
◆ speed
| double lci_strategic_plugin::LCIStrategicPlugin::VehicleState::speed |
Definition at line 281 of file lci_strategic_plugin.hpp.
Referenced by lci_strategic_plugin::LCIStrategicPlugin::extractInitialState(), lci_strategic_plugin::LCIStrategicPlugin::handleStopping(), lci_strategic_plugin::LCIStrategicPlugin::planWhenAPPROACHING(), lci_strategic_plugin::LCIStrategicPlugin::planWhenDEPARTING(), lci_strategic_plugin::LCIStrategicPlugin::planWhenUNAVAILABLE(), and lci_strategic_plugin::LCIStrategicPlugin::planWhenWAITING().
◆ stamp
| rclcpp::Time lci_strategic_plugin::LCIStrategicPlugin::VehicleState::stamp |
Definition at line 279 of file lci_strategic_plugin.hpp.
Referenced by lci_strategic_plugin::LCIStrategicPlugin::extractInitialState(), lci_strategic_plugin::LCIStrategicPlugin::get_final_entry_time_and_conditions(), lci_strategic_plugin::LCIStrategicPlugin::handleCruisingUntilStop(), lci_strategic_plugin::LCIStrategicPlugin::handleFailureCase(), lci_strategic_plugin::LCIStrategicPlugin::handleGreenSignalScenario(), lci_strategic_plugin::LCIStrategicPlugin::handleStopping(), lci_strategic_plugin::LCIStrategicPlugin::plan_maneuvers_callback(), lci_strategic_plugin::LCIStrategicPlugin::planWhenAPPROACHING(), lci_strategic_plugin::LCIStrategicPlugin::planWhenDEPARTING(), and lci_strategic_plugin::LCIStrategicPlugin::planWhenWAITING().
The documentation for this struct was generated from the following file:
- lci_strategic_plugin/include/lci_strategic_plugin/lci_strategic_plugin.hpp