#include <lightbar_manager_node.hpp>
Public Attributes | |
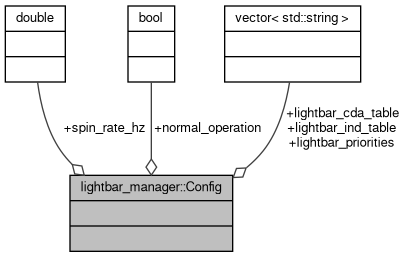
| double | spin_rate_hz = 10.0 |
| bool | normal_operation = true |
| std::vector< std::string > | lightbar_priorities = {"lightbar_manager"} |
| std::vector< std::string > | lightbar_cda_table = {"TypeA", "TypeB", "TypeC", "TypeD"} |
| std::vector< std::string > | lightbar_ind_table = {"YELLOW_DIM","YELLOW_DIM","YELLOW_FLASH","YELLOW_SIDES"} |
Friends | |
| std::ostream & | operator<< (std::ostream &output, const Config &c) |
Detailed Description
Config struct.
Definition at line 46 of file lightbar_manager_node.hpp.
Friends And Related Function Documentation
◆ operator<<
|
friend |
Definition at line 55 of file lightbar_manager_node.hpp.
Member Data Documentation
◆ lightbar_cda_table
| std::vector<std::string> lightbar_manager::Config::lightbar_cda_table = {"TypeA", "TypeB", "TypeC", "TypeD"} |
Definition at line 51 of file lightbar_manager_node.hpp.
Referenced by lightbar_manager::LightBarManager::LightBarManager(), and lightbar_manager::LightBarManager::handle_on_configure().
◆ lightbar_ind_table
| std::vector<std::string> lightbar_manager::Config::lightbar_ind_table = {"YELLOW_DIM","YELLOW_DIM","YELLOW_FLASH","YELLOW_SIDES"} |
Definition at line 52 of file lightbar_manager_node.hpp.
Referenced by lightbar_manager::LightBarManager::LightBarManager(), and lightbar_manager::LightBarManager::handle_on_configure().
◆ lightbar_priorities
| std::vector<std::string> lightbar_manager::Config::lightbar_priorities = {"lightbar_manager"} |
Definition at line 50 of file lightbar_manager_node.hpp.
Referenced by lightbar_manager::LightBarManager::LightBarManager(), and lightbar_manager::LightBarManager::handle_on_configure().
◆ normal_operation
| bool lightbar_manager::Config::normal_operation = true |
Definition at line 49 of file lightbar_manager_node.hpp.
Referenced by lightbar_manager::LightBarManager::LightBarManager(), and lightbar_manager::LightBarManager::handle_on_configure().
◆ spin_rate_hz
| double lightbar_manager::Config::spin_rate_hz = 10.0 |
Definition at line 48 of file lightbar_manager_node.hpp.
Referenced by lightbar_manager::LightBarManager::LightBarManager(), lightbar_manager::LightBarManager::handle_on_activate(), and lightbar_manager::LightBarManager::handle_on_configure().
The documentation for this struct was generated from the following file:
- lightbar_manager/include/lightbar_manager/lightbar_manager_node.hpp