#include <plan_delegator.hpp>
Public Attributes | |
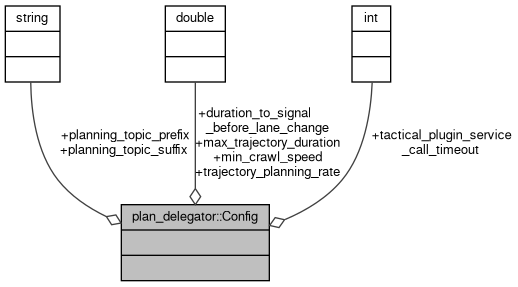
| std::string | planning_topic_prefix = "/plugins/" |
| std::string | planning_topic_suffix = "/plan_trajectory" |
| double | trajectory_planning_rate = 10.0 |
| double | max_trajectory_duration = 6.0 |
| double | min_crawl_speed = 2.2352 |
| double | duration_to_signal_before_lane_change = 2.5 |
| int | tactical_plugin_service_call_timeout = 100 |
| int | max_traj_generation_reattempt = 5 |
Friends | |
| std::ostream & | operator<< (std::ostream &output, const Config &c) |
Detailed Description
Config struct.
Definition at line 71 of file plan_delegator.hpp.
Friends And Related Function Documentation
◆ operator<<
|
friend |
Definition at line 85 of file plan_delegator.hpp.
Member Data Documentation
◆ duration_to_signal_before_lane_change
| double plan_delegator::Config::duration_to_signal_before_lane_change = 2.5 |
Definition at line 79 of file plan_delegator.hpp.
Referenced by plan_delegator::PlanDelegator::PlanDelegator(), plan_delegator::PlanDelegator::handle_on_configure(), and plan_delegator::PlanDelegator::publishTurnSignalCommand().
◆ max_traj_generation_reattempt
| int plan_delegator::Config::max_traj_generation_reattempt = 5 |
Definition at line 82 of file plan_delegator.hpp.
Referenced by plan_delegator::PlanDelegator::PlanDelegator(), plan_delegator::PlanDelegator::handle_on_configure(), and plan_delegator::PlanDelegator::onTrajPlanTick().
◆ max_trajectory_duration
| double plan_delegator::Config::max_trajectory_duration = 6.0 |
Definition at line 77 of file plan_delegator.hpp.
Referenced by plan_delegator::PlanDelegator::PlanDelegator(), and plan_delegator::PlanDelegator::handle_on_configure().
◆ min_crawl_speed
| double plan_delegator::Config::min_crawl_speed = 2.2352 |
Definition at line 78 of file plan_delegator.hpp.
Referenced by plan_delegator::PlanDelegator::PlanDelegator(), and plan_delegator::PlanDelegator::handle_on_configure().
◆ planning_topic_prefix
| std::string plan_delegator::Config::planning_topic_prefix = "/plugins/" |
Definition at line 74 of file plan_delegator.hpp.
Referenced by plan_delegator::PlanDelegator::PlanDelegator(), plan_delegator::PlanDelegator::getPlannerClientByName(), and plan_delegator::PlanDelegator::handle_on_configure().
◆ planning_topic_suffix
| std::string plan_delegator::Config::planning_topic_suffix = "/plan_trajectory" |
Definition at line 75 of file plan_delegator.hpp.
Referenced by plan_delegator::PlanDelegator::PlanDelegator(), plan_delegator::PlanDelegator::getPlannerClientByName(), and plan_delegator::PlanDelegator::handle_on_configure().
◆ tactical_plugin_service_call_timeout
| int plan_delegator::Config::tactical_plugin_service_call_timeout = 100 |
Definition at line 80 of file plan_delegator.hpp.
Referenced by plan_delegator::PlanDelegator::PlanDelegator(), plan_delegator::PlanDelegator::handle_on_configure(), and plan_delegator::PlanDelegator::planTrajectory().
◆ trajectory_planning_rate
| double plan_delegator::Config::trajectory_planning_rate = 10.0 |
Definition at line 76 of file plan_delegator.hpp.
Referenced by plan_delegator::PlanDelegator::PlanDelegator(), plan_delegator::PlanDelegator::handle_on_activate(), and plan_delegator::PlanDelegator::handle_on_configure().
The documentation for this struct was generated from the following file:
- plan_delegator/include/plan_delegator.hpp