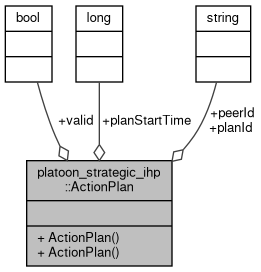
Struct for an action plan, which describes a transient joining activity. More...
#include <platoon_manager_ihp.h>
Public Member Functions | |
| ActionPlan () | |
| ActionPlan (bool valid, unsigned long planStartTime, std::string planId, std::string peerId) | |
Public Attributes | |
| bool | valid |
| unsigned long | planStartTime |
| std::string | planId |
| std::string | peerId |
Detailed Description
Struct for an action plan, which describes a transient joining activity.
Definition at line 45 of file platoon_manager_ihp.h.
Constructor & Destructor Documentation
◆ ActionPlan() [1/2]
|
inline |
Definition at line 52 of file platoon_manager_ihp.h.
◆ ActionPlan() [2/2]
|
inline |
Definition at line 54 of file platoon_manager_ihp.h.
Member Data Documentation
◆ peerId
| std::string platoon_strategic_ihp::ActionPlan::peerId |
Definition at line 50 of file platoon_manager_ihp.h.
Referenced by platoon_strategic_ihp::PlatoonManager::clearActionPlan(), platoon_strategic_ihp::PlatoonStrategicIHPPlugin::mob_req_cb_candidateleader(), platoon_strategic_ihp::PlatoonStrategicIHPPlugin::mob_req_cb_leaderwaiting(), platoon_strategic_ihp::PlatoonStrategicIHPPlugin::mob_resp_cb(), platoon_strategic_ihp::PlatoonStrategicIHPPlugin::mob_resp_cb_leader(), platoon_strategic_ihp::PlatoonStrategicIHPPlugin::mob_resp_cb_leaderaborting(), platoon_strategic_ihp::PlatoonStrategicIHPPlugin::mob_resp_cb_preparetojoin(), and platoon_strategic_ihp::PlatoonStrategicIHPPlugin::run_candidate_follower().
◆ planId
| std::string platoon_strategic_ihp::ActionPlan::planId |
Definition at line 49 of file platoon_manager_ihp.h.
Referenced by platoon_strategic_ihp::PlatoonManager::clearActionPlan(), platoon_strategic_ihp::PlatoonStrategicIHPPlugin::mob_resp_cb(), platoon_strategic_ihp::PlatoonStrategicIHPPlugin::mob_resp_cb_candidatefollower(), platoon_strategic_ihp::PlatoonStrategicIHPPlugin::mob_resp_cb_follower(), platoon_strategic_ihp::PlatoonStrategicIHPPlugin::mob_resp_cb_leader(), platoon_strategic_ihp::PlatoonStrategicIHPPlugin::mob_resp_cb_leaderaborting(), and platoon_strategic_ihp::PlatoonStrategicIHPPlugin::run_leader().
◆ planStartTime
| unsigned long platoon_strategic_ihp::ActionPlan::planStartTime |
Definition at line 48 of file platoon_manager_ihp.h.
Referenced by platoon_strategic_ihp::PlatoonStrategicIHPPlugin::run_candidate_follower(), and platoon_strategic_ihp::PlatoonStrategicIHPPlugin::run_leader().
◆ valid
| bool platoon_strategic_ihp::ActionPlan::valid |
Definition at line 47 of file platoon_manager_ihp.h.
Referenced by platoon_strategic_ihp::PlatoonManager::clearActionPlan(), platoon_strategic_ihp::PlatoonStrategicIHPPlugin::mob_op_cb_leader(), platoon_strategic_ihp::PlatoonStrategicIHPPlugin::mob_req_cb_leader(), platoon_strategic_ihp::PlatoonStrategicIHPPlugin::mob_req_cb_leadwithoperation(), platoon_strategic_ihp::PlatoonStrategicIHPPlugin::mob_resp_cb(), platoon_strategic_ihp::PlatoonStrategicIHPPlugin::mob_resp_cb_candidatefollower(), platoon_strategic_ihp::PlatoonStrategicIHPPlugin::mob_resp_cb_leader(), platoon_strategic_ihp::PlatoonStrategicIHPPlugin::mob_resp_cb_leaderaborting(), platoon_strategic_ihp::PlatoonStrategicIHPPlugin::mob_resp_cb_preparetojoin(), platoon_strategic_ihp::PlatoonStrategicIHPPlugin::run_candidate_follower(), platoon_strategic_ihp::PlatoonStrategicIHPPlugin::run_leader(), and platoon_strategic_ihp::PlatoonStrategicIHPPlugin::run_prepare_to_join().
The documentation for this struct was generated from the following file:
- platooning_strategic_IHP/include/platoon_strategic_ihp/platoon_manager_ihp.h