Platoon member info. More...
#include <platoon_manager_ihp.h>
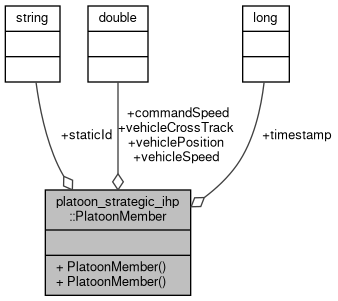
Public Member Functions | |
| PlatoonMember () | |
| PlatoonMember (std::string staticId, double commandSpeed, double vehicleSpeed, double vehiclePosition, double vehicleCrossTrack, long timestamp) | |
Public Attributes | |
| std::string | staticId |
| double | commandSpeed |
| double | vehicleSpeed |
| double | vehiclePosition |
| double | vehicleCrossTrack |
| long | timestamp |
Detailed Description
Platoon member info.
Definition at line 96 of file platoon_manager_ihp.h.
Constructor & Destructor Documentation
◆ PlatoonMember() [1/2]
|
inline |
Definition at line 111 of file platoon_manager_ihp.h.
◆ PlatoonMember() [2/2]
|
inline |
Definition at line 113 of file platoon_manager_ihp.h.
Member Data Documentation
◆ commandSpeed
| double platoon_strategic_ihp::PlatoonMember::commandSpeed |
Definition at line 101 of file platoon_manager_ihp.h.
Referenced by platoon_strategic_ihp::PlatoonStrategicIHPPlugin::composePlatoonInfoMsg().
◆ staticId
| std::string platoon_strategic_ihp::PlatoonMember::staticId |
Definition at line 99 of file platoon_manager_ihp.h.
Referenced by platoon_strategic_ihp::PlatoonManager::changeFromLeaderToFollower(), platoon_strategic_ihp::PlatoonStrategicIHPPlugin::composePlatoonInfoMsg(), platoon_strategic_ihp::PlatoonManager::getDynamicLeader(), platoon_strategic_ihp::PlatoonStrategicIHPPlugin::mob_req_cb_leaderwaiting(), and platoon_strategic_ihp::PlatoonManager::updatesOrAddMemberInfo().
◆ timestamp
| long platoon_strategic_ihp::PlatoonMember::timestamp |
Definition at line 109 of file platoon_manager_ihp.h.
◆ vehicleCrossTrack
| double platoon_strategic_ihp::PlatoonMember::vehicleCrossTrack |
Definition at line 107 of file platoon_manager_ihp.h.
◆ vehiclePosition
| double platoon_strategic_ihp::PlatoonMember::vehiclePosition |
◆ vehicleSpeed
| double platoon_strategic_ihp::PlatoonMember::vehicleSpeed |
Definition at line 103 of file platoon_manager_ihp.h.
The documentation for this struct was generated from the following file:
- platooning_strategic_IHP/include/platoon_strategic_ihp/platoon_manager_ihp.h