MockControllerDriver.h File Reference
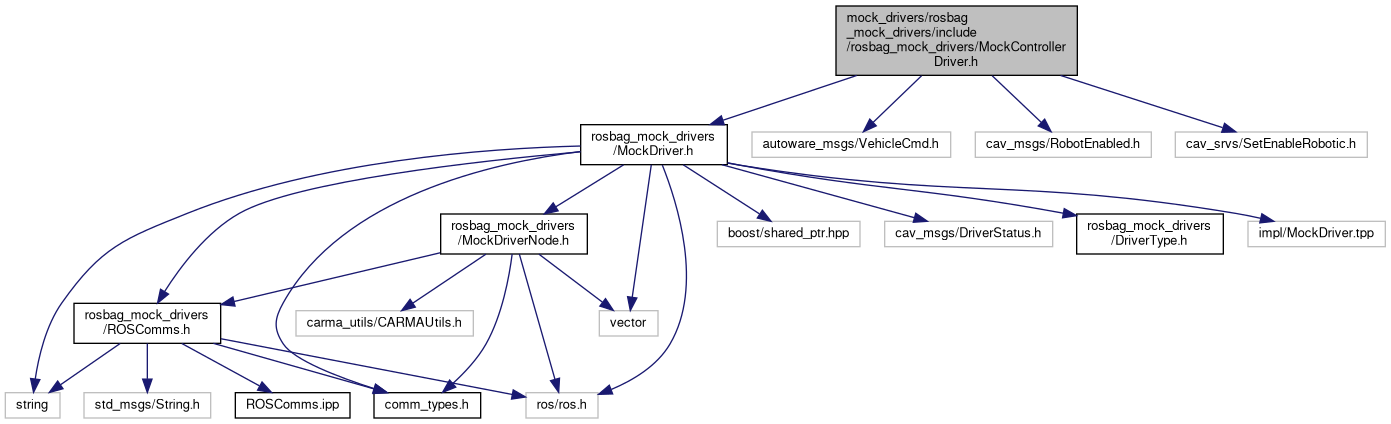
#include "rosbag_mock_drivers/MockDriver.h"#include <autoware_msgs/VehicleCmd.h>#include <cav_msgs/RobotEnabled.h>#include <cav_srvs/SetEnableRobotic.h>
Include dependency graph for MockControllerDriver.h:
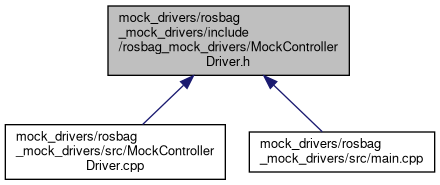
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | mock_drivers::MockControllerDriver |
| Mock Controller driver. Implements controller service and feedback logic to support CARMA Platform Guidance State Machine. More... | |
Namespaces | |
| namespace | mock_drivers |