MockDriver.h File Reference
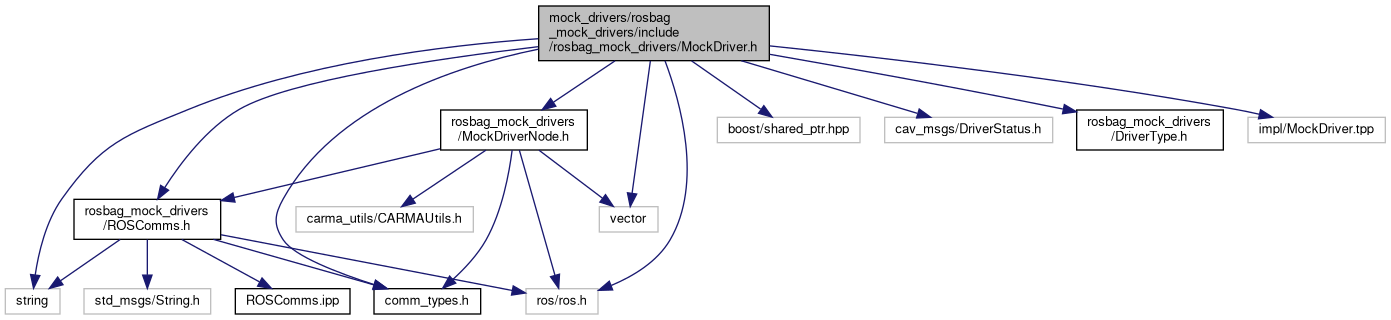
#include <ros/ros.h>#include <string>#include <vector>#include <boost/shared_ptr.hpp>#include <cav_msgs/DriverStatus.h>#include "rosbag_mock_drivers/ROSComms.h"#include "rosbag_mock_drivers/MockDriverNode.h"#include "rosbag_mock_drivers/comm_types.h"#include "rosbag_mock_drivers/DriverType.h"#include "impl/MockDriver.tpp"
Include dependency graph for MockDriver.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | mock_drivers::MockDriver |
| The template node for the mock drivers that will handle all of the default driver logic. More... | |
Namespaces | |
| namespace | mock_drivers |