arbitrator_utils.cpp File Reference
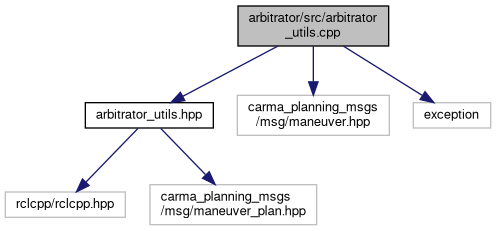
#include "arbitrator_utils.hpp"#include <carma_planning_msgs/msg/maneuver.hpp>#include <exception>
Include dependency graph for arbitrator_utils.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | arbitrator_utils |
Functions | |
| rclcpp::Time | arbitrator_utils::get_plan_end_time (const carma_planning_msgs::msg::ManeuverPlan &) |
| Get the end time of the first maneuver in the plan. More... | |
| double | arbitrator_utils::get_plan_end_distance (const carma_planning_msgs::msg::ManeuverPlan &) |
| Get the end distance of the first maneuver in the plan. More... | |
| rclcpp::Time | arbitrator_utils::get_plan_start_time (const carma_planning_msgs::msg::ManeuverPlan &) |
| Get the start time of the first maneuver in the plan. More... | |
| double | arbitrator_utils::get_plan_start_distance (const carma_planning_msgs::msg::ManeuverPlan &) |
| Get the start distance of the first maneuver in the plan. More... | |
| rclcpp::Time | arbitrator_utils::get_maneuver_end_time (const carma_planning_msgs::msg::Maneuver &) |
| Get the end time of the specified maneuver. More... | |
| rclcpp::Time | arbitrator_utils::get_maneuver_start_time (const carma_planning_msgs::msg::Maneuver &) |
| Get the start time of the specified maneuver. More... | |
| double | arbitrator_utils::get_maneuver_end_distance (const carma_planning_msgs::msg::Maneuver &) |
| Get the end distance of the specified maneuver. More... | |
| double | arbitrator_utils::get_maneuver_start_distance (const carma_planning_msgs::msg::Maneuver &) |
| Get the start distance the specified maneuver. More... | |