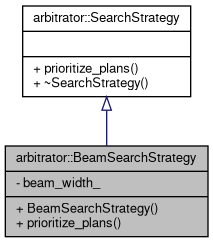
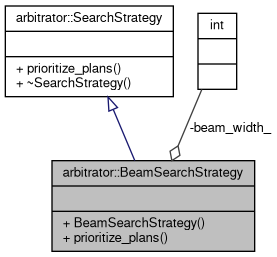
Implementation of SearchStrategy by usage of Beam Search. More...
#include <beam_search_strategy.hpp>
Public Member Functions | |
| BeamSearchStrategy (int beam_width) | |
| Constructor for BeamSearchStrategy. More... | |
| std::vector< std::pair< carma_planning_msgs::msg::ManeuverPlan, double > > | prioritize_plans (std::vector< std::pair< carma_planning_msgs::msg::ManeuverPlan, double > > plans) const |
| Prioritize the plans and eliminate those outside the beam width. More... | |
 Public Member Functions inherited from arbitrator::SearchStrategy Public Member Functions inherited from arbitrator::SearchStrategy | |
| virtual std::vector< std::pair< carma_planning_msgs::msg::ManeuverPlan, double > > | prioritize_plans (std::vector< std::pair< carma_planning_msgs::msg::ManeuverPlan, double > > plans) const =0 |
| Sort the list of plans in the open-set by priority. More... | |
| virtual | ~SearchStrategy () |
| Virtual destructor provided for memory safety. More... | |
Private Attributes | |
| int | beam_width_ |
Detailed Description
Implementation of SearchStrategy by usage of Beam Search.
Beam Search is similar to breadth-first search with the exception that only a certain number of nodes at each step are retained to the next. This is referred to as the "beam width" of the search and is applied to the sorted open list at the end of every search step. This provides a reasonable optimization by ensuring that not all nodes need to be expanded.
A beam width of n=1 is identical to naive greedy search.
A beam width of n=inf is identical to breadth-first search
Definition at line 37 of file beam_search_strategy.hpp.
Constructor & Destructor Documentation
◆ BeamSearchStrategy()
|
inline |
Constructor for BeamSearchStrategy.
- Parameters
-
beam_width The number of nodes to include in the search beam during each depth of the search an infinite value would be equivalent to breadth-first search. A value of 1 is equivalent to naive greedy search.
Definition at line 46 of file beam_search_strategy.hpp.
Member Function Documentation
◆ prioritize_plans()
|
virtual |
Prioritize the plans and eliminate those outside the beam width.
- Parameters
-
plans The plans to evaluate as (plan, cot ) pairs
- Returns
- The sorted list of up to size beam_width
Implements arbitrator::SearchStrategy.
Definition at line 21 of file beam_search_strategy.cpp.
References beam_width_.
Member Data Documentation
◆ beam_width_
|
private |
Definition at line 56 of file beam_search_strategy.hpp.
Referenced by prioritize_plans().
The documentation for this class was generated from the following files:
- arbitrator/include/beam_search_strategy.hpp
- arbitrator/src/beam_search_strategy.cpp