Generic interface representing a computation to prioritize nodes for expansion in a search graph. More...
#include <search_strategy.hpp>
Public Member Functions | |
| virtual std::vector< std::pair< carma_planning_msgs::msg::ManeuverPlan, double > > | prioritize_plans (std::vector< std::pair< carma_planning_msgs::msg::ManeuverPlan, double > > plans) const =0 |
| Sort the list of plans in the open-set by priority. More... | |
| virtual | ~SearchStrategy () |
| Virtual destructor provided for memory safety. More... | |
Detailed Description
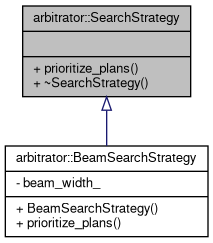
Generic interface representing a computation to prioritize nodes for expansion in a search graph.
This interface takes in plans and their computed costs (C) and then may apply a heuristic cost (H) if so desired before sorting by C+H or otherwise prioritizing the potential plans.
It is not safe to assume that the size of the input list equals the size the list returned.
Definition at line 36 of file search_strategy.hpp.
Constructor & Destructor Documentation
◆ ~SearchStrategy()
|
inlinevirtual |
Virtual destructor provided for memory safety.
Definition at line 50 of file search_strategy.hpp.
Member Function Documentation
◆ prioritize_plans()
|
pure virtual |
Sort the list of plans in the open-set by priority.
- Parameters
-
plans The list of (plan, cost) pairs to sort
- Returns
- A sorted (and/or reduced) list of (plan, cost) pairs after a heuristic may or may not have been applied
Implemented in arbitrator::BeamSearchStrategy.
The documentation for this class was generated from the following file:
- arbitrator/include/search_strategy.hpp