#include <GeofenceSchedule.hpp>
Public Types | |
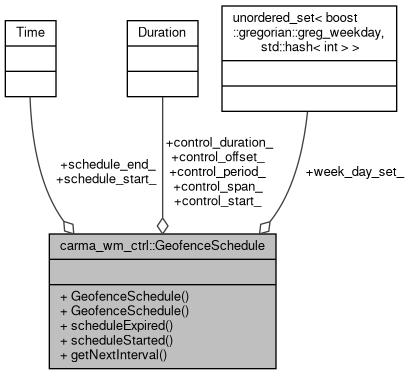
| using | DayOfTheWeekSet = std::unordered_set< boost::gregorian::greg_weekday, std::hash< int > > |
Public Member Functions | |
| GeofenceSchedule () | |
| Default Constructor does not initialize any members. More... | |
| GeofenceSchedule (rclcpp::Time schedule_start, rclcpp::Time schedule_end, rclcpp::Duration control_start, rclcpp::Duration control_duration, rclcpp::Duration control_offset, rclcpp::Duration control_span, rclcpp::Duration control_period, DayOfTheWeekSet week_day_set={ 0, 1, 2, 3, 4, 5, 6 }) | |
| Constructor. More... | |
| bool | scheduleExpired (const rclcpp::Time &time) const |
| Returns true if the schedule has expired by the provided time. More... | |
| bool | scheduleStarted (const rclcpp::Time &time) const |
| Returns true if the schedule has started by the provided time. More... | |
| std::pair< bool, rclcpp::Time > | getNextInterval (const rclcpp::Time &time) const |
| Returns the start time of the next active interval defined by this schedule. More... | |
Public Attributes | |
| rclcpp::Time | schedule_start_ |
| rclcpp::Time | schedule_end_ |
| rclcpp::Duration | control_start_ {0, 0} |
| rclcpp::Duration | control_duration_ {0, 0} |
| rclcpp::Duration | control_offset_ {0, 0} |
| rclcpp::Duration | control_span_ {0, 0} |
| rclcpp::Duration | control_period_ {0, 0} |
| DayOfTheWeekSet | week_day_set_ |
Detailed Description
Definition at line 26 of file GeofenceSchedule.hpp.
Member Typedef Documentation
◆ DayOfTheWeekSet
| using carma_wm_ctrl::GeofenceSchedule::DayOfTheWeekSet = std::unordered_set<boost::gregorian::greg_weekday, std::hash<int> > |
Definition at line 38 of file GeofenceSchedule.hpp.
Constructor & Destructor Documentation
◆ GeofenceSchedule() [1/2]
| carma_wm_ctrl::GeofenceSchedule::GeofenceSchedule | ( | ) |
Default Constructor does not initialize any members.
Definition at line 22 of file GeofenceSchedule.cpp.
◆ GeofenceSchedule() [2/2]
| carma_wm_ctrl::GeofenceSchedule::GeofenceSchedule | ( | rclcpp::Time | schedule_start, |
| rclcpp::Time | schedule_end, | ||
| rclcpp::Duration | control_start, | ||
| rclcpp::Duration | control_duration, | ||
| rclcpp::Duration | control_offset, | ||
| rclcpp::Duration | control_span, | ||
| rclcpp::Duration | control_period, | ||
| DayOfTheWeekSet | week_day_set = { 0, 1, 2, 3, 4, 5, 6 } |
||
| ) |
Constructor.
- Parameters
-
schedule_start Overall schedule start in UTC schedule_end Overall schedule end in UTC control_start Duration from start of day control_duration Duration from start of control_start control_offset Duration from start of day (specifies start time for repeat parameters - span, period) control_span Duration of active status. Starts from offset control_period Interval between active status within control_duration since control_start week_day_set Set of days of the week which this schedule applies to. Defaults as all days of the week
Definition at line 26 of file GeofenceSchedule.cpp.
Member Function Documentation
◆ getNextInterval()
| std::pair< bool, rclcpp::Time > carma_wm_ctrl::GeofenceSchedule::getNextInterval | ( | const rclcpp::Time & | time | ) | const |
Returns the start time of the next active interval defined by this schedule.
- Parameters
-
time UTC time to compare
- Returns
- Returns a pair with the following semantics First Element: A boolean indicating if the provided time is within a currently active control period Second Element: The start time of the next scheduled active control interval within the current day. Returns rclcpp::Time(0) when the schedule is expired or the next interval will be on a different day of the week or after schedule end
TODO the UTC offset is provided in the geofence spec but for now we will ignore and assume all times are UTC
Definition at line 46 of file GeofenceSchedule.cpp.
References control_duration_, control_offset_, control_period_, control_span_, control_start_, schedule_end_, scheduleExpired(), and week_day_set_.

◆ scheduleExpired()
| bool carma_wm_ctrl::GeofenceSchedule::scheduleExpired | ( | const rclcpp::Time & | time | ) | const |
Returns true if the schedule has expired by the provided time.
- Parameters
-
time UTC time to compare
- Returns
- True if time > schedule_end
Definition at line 34 of file GeofenceSchedule.cpp.
References schedule_end_.
Referenced by getNextInterval().

◆ scheduleStarted()
| bool carma_wm_ctrl::GeofenceSchedule::scheduleStarted | ( | const rclcpp::Time & | time | ) | const |
Returns true if the schedule has started by the provided time.
- Parameters
-
time UTC time to compare
- Returns
- True if time > schedule_start
Definition at line 39 of file GeofenceSchedule.cpp.
References schedule_start_.
Member Data Documentation
◆ control_duration_
| rclcpp::Duration carma_wm_ctrl::GeofenceSchedule::control_duration_ {0, 0} |
Definition at line 33 of file GeofenceSchedule.hpp.
Referenced by getNextInterval().
◆ control_offset_
| rclcpp::Duration carma_wm_ctrl::GeofenceSchedule::control_offset_ {0, 0} |
Definition at line 34 of file GeofenceSchedule.hpp.
Referenced by getNextInterval().
◆ control_period_
| rclcpp::Duration carma_wm_ctrl::GeofenceSchedule::control_period_ {0, 0} |
Definition at line 36 of file GeofenceSchedule.hpp.
Referenced by getNextInterval().
◆ control_span_
| rclcpp::Duration carma_wm_ctrl::GeofenceSchedule::control_span_ {0, 0} |
Definition at line 35 of file GeofenceSchedule.hpp.
Referenced by getNextInterval().
◆ control_start_
| rclcpp::Duration carma_wm_ctrl::GeofenceSchedule::control_start_ {0, 0} |
Definition at line 32 of file GeofenceSchedule.hpp.
Referenced by getNextInterval().
◆ schedule_end_
| rclcpp::Time carma_wm_ctrl::GeofenceSchedule::schedule_end_ |
Definition at line 30 of file GeofenceSchedule.hpp.
Referenced by getNextInterval(), and scheduleExpired().
◆ schedule_start_
| rclcpp::Time carma_wm_ctrl::GeofenceSchedule::schedule_start_ |
Definition at line 29 of file GeofenceSchedule.hpp.
Referenced by scheduleStarted().
◆ week_day_set_
| DayOfTheWeekSet carma_wm_ctrl::GeofenceSchedule::week_day_set_ |
Definition at line 41 of file GeofenceSchedule.hpp.
Referenced by getNextInterval().
The documentation for this class was generated from the following files:
- carma_wm_ctrl/include/carma_wm_ctrl/GeofenceSchedule.hpp
- carma_wm_ctrl/src/GeofenceSchedule.cpp