A GeofenceScheduler is responsable for notifying the user when a geofence is active or inactive according to its schedule. More...
#include <GeofenceScheduler.hpp>
Public Member Functions | |
| GeofenceScheduler (std::shared_ptr< TimerFactory > timerFactory) | |
| Constructor which takes in a TimerFactory. Timers from this factory will be used to generate the triggers for goefence activity. More... | |
| void | addGeofence (std::shared_ptr< Geofence > gf_ptr) |
| Add a geofence to the scheduler. This will cause it to trigger an event when it becomes active or goes inactive according to its schedule. More... | |
| void | onGeofenceActive (std::function< void(std::shared_ptr< Geofence >)> active_callback) |
| Method which allows the user to set a callback which will be triggered when a geofence becomes active. More... | |
| void | onGeofenceInactive (std::function< void(std::shared_ptr< Geofence >)> inactive_callback) |
| Method which allows the user to set a callback which will be triggered when a geofence becomes in-active. More... | |
| void | clearTimers () |
| Clears the expired timers from the memory of this scheduler. More... | |
| rcl_clock_type_t | getClockType () |
| Get the clock type of the clock being created by the timer factory. More... | |
| rclcpp::Time | now () |
| Get current time used by scheduler. More... | |
Private Types | |
| using | Timer = carma_ros2_utils::timers::Timer |
| using | TimerFactory = carma_ros2_utils::timers::TimerFactory |
| using | ROSTimerFactory = carma_ros2_utils::timers::ROSTimerFactory |
| using | TimerPtr = std::unique_ptr< Timer > |
Private Member Functions | |
| uint32_t | nextId () |
| Generates the next id to be used for a timer. More... | |
| void | startGeofenceCallback (std::shared_ptr< Geofence > gf_ptr, const unsigned int schedule_id, const int32_t timer_id) |
| The callback which is triggered when a geofence becomes active This will call the user set active_callback set from the onGeofenceActive function. More... | |
| void | endGeofenceCallback (std::shared_ptr< Geofence > gf_ptr, const unsigned int schedule_id, const int32_t timer_id) |
| The callback which is triggered when a geofence becomes in-active This will call the user set inactive_callback set from the onGeofenceInactive function. More... | |
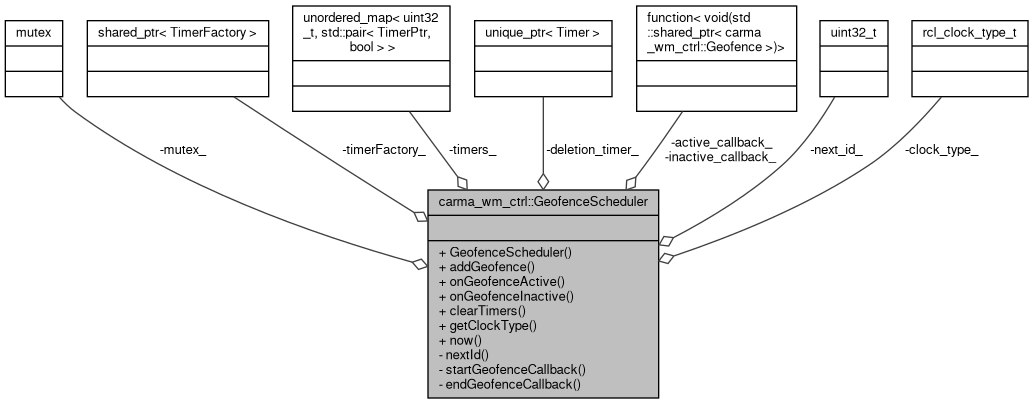
Private Attributes | |
| std::mutex | mutex_ |
| std::shared_ptr< TimerFactory > | timerFactory_ |
| std::unordered_map< uint32_t, std::pair< TimerPtr, bool > > | timers_ |
| std::unique_ptr< Timer > | deletion_timer_ |
| std::function< void(std::shared_ptr< Geofence >)> | active_callback_ |
| std::function< void(std::shared_ptr< Geofence >)> | inactive_callback_ |
| uint32_t | next_id_ = 0 |
| rcl_clock_type_t | clock_type_ = RCL_SYSTEM_TIME |
Detailed Description
A GeofenceScheduler is responsable for notifying the user when a geofence is active or inactive according to its schedule.
Definition at line 34 of file GeofenceScheduler.hpp.
Member Typedef Documentation
◆ ROSTimerFactory
|
private |
Definition at line 38 of file GeofenceScheduler.hpp.
◆ Timer
|
private |
Definition at line 36 of file GeofenceScheduler.hpp.
◆ TimerFactory
|
private |
Definition at line 37 of file GeofenceScheduler.hpp.
◆ TimerPtr
|
private |
Definition at line 39 of file GeofenceScheduler.hpp.
Constructor & Destructor Documentation
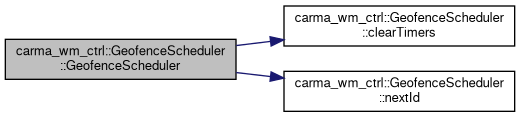
◆ GeofenceScheduler()
| carma_wm_ctrl::GeofenceScheduler::GeofenceScheduler | ( | std::shared_ptr< TimerFactory > | timerFactory | ) |
Constructor which takes in a TimerFactory. Timers from this factory will be used to generate the triggers for goefence activity.
- Parameters
-
timerFactory A pointer to a TimerFactory which can be used to generate timers for geofence triggers.
Definition at line 23 of file GeofenceScheduler.cpp.
References clearTimers(), clock_type_, deletion_timer_, nextId(), and timerFactory_.
Member Function Documentation
◆ addGeofence()
| void carma_wm_ctrl::GeofenceScheduler::addGeofence | ( | std::shared_ptr< Geofence > | gf_ptr | ) |
Add a geofence to the scheduler. This will cause it to trigger an event when it becomes active or goes inactive according to its schedule.
- Parameters
-
geofence The geofence to be added
Definition at line 70 of file GeofenceScheduler.cpp.
References clock_type_, mutex_, nextId(), startGeofenceCallback(), timerFactory_, and timers_.
Referenced by carma_wm_ctrl::WMBroadcaster::scheduleGeofence().


◆ clearTimers()
| void carma_wm_ctrl::GeofenceScheduler::clearTimers | ( | ) |
Clears the expired timers from the memory of this scheduler.
Definition at line 48 of file GeofenceScheduler.cpp.
References mutex_, and timers_.
Referenced by GeofenceScheduler().

◆ endGeofenceCallback()
|
private |
The callback which is triggered when a geofence becomes in-active This will call the user set inactive_callback set from the onGeofenceInactive function.
- Parameters
-
event The record of the timer event causing this to trigger gf The geofence which is being un-activated schedule_id index number of the schedule being used corresponding to this geofence timer_id The id of the timer which caused this callback to occur
Definition at line 135 of file GeofenceScheduler.cpp.
References clock_type_, inactive_callback_, mutex_, nextId(), startGeofenceCallback(), timerFactory_, and timers_.
Referenced by startGeofenceCallback().


◆ getClockType()
| rcl_clock_type_t carma_wm_ctrl::GeofenceScheduler::getClockType | ( | ) |
Get the clock type of the clock being created by the timer factory.
Definition at line 43 of file GeofenceScheduler.cpp.
References clock_type_.
Referenced by carma_wm_ctrl::WMBroadcaster::addScheduleFromMsg(), and carma_wm_ctrl::WMBroadcaster::controlRequestFromRoute().

◆ nextId()
|
private |
Generates the next id to be used for a timer.
- Returns
- The next available timer id
Definition at line 37 of file GeofenceScheduler.cpp.
References next_id_.
Referenced by GeofenceScheduler(), addGeofence(), endGeofenceCallback(), and startGeofenceCallback().

◆ now()
| rclcpp::Time carma_wm_ctrl::GeofenceScheduler::now | ( | ) |
Get current time used by scheduler.
Definition at line 32 of file GeofenceScheduler.cpp.
References timerFactory_.
Referenced by carma_wm_ctrl::WMBroadcaster::pubTCMACK().

◆ onGeofenceActive()
| void carma_wm_ctrl::GeofenceScheduler::onGeofenceActive | ( | std::function< void(std::shared_ptr< Geofence >)> | active_callback | ) |
Method which allows the user to set a callback which will be triggered when a geofence becomes active.
- Parameters
-
active_callback The callback which will be triggered
Definition at line 172 of file GeofenceScheduler.cpp.
References active_callback_, and mutex_.
Referenced by carma_wm_ctrl::WMBroadcaster::WMBroadcaster().

◆ onGeofenceInactive()
| void carma_wm_ctrl::GeofenceScheduler::onGeofenceInactive | ( | std::function< void(std::shared_ptr< Geofence >)> | inactive_callback | ) |
Method which allows the user to set a callback which will be triggered when a geofence becomes in-active.
- Parameters
-
inactive_callback The callback which will be triggered
Definition at line 178 of file GeofenceScheduler.cpp.
References inactive_callback_, and mutex_.
Referenced by carma_wm_ctrl::WMBroadcaster::WMBroadcaster().

◆ startGeofenceCallback()
|
private |
The callback which is triggered when a geofence becomes active This will call the user set active_callback set from the onGeofenceActive function.
- Parameters
-
event The record of the timer event causing this to trigger gf The geofence which is being activated schedule_id index number of the schedule being used corresponding to this geofence timer_id The id of the timer which caused this callback to occur
Definition at line 110 of file GeofenceScheduler.cpp.
References active_callback_, endGeofenceCallback(), mutex_, nextId(), timerFactory_, timers_, and carma_cooperative_perception::to_string().
Referenced by addGeofence(), and endGeofenceCallback().


Member Data Documentation
◆ active_callback_
|
private |
Definition at line 45 of file GeofenceScheduler.hpp.
Referenced by onGeofenceActive(), and startGeofenceCallback().
◆ clock_type_
|
private |
Definition at line 48 of file GeofenceScheduler.hpp.
Referenced by GeofenceScheduler(), addGeofence(), endGeofenceCallback(), and getClockType().
◆ deletion_timer_
|
private |
Definition at line 44 of file GeofenceScheduler.hpp.
Referenced by GeofenceScheduler().
◆ inactive_callback_
|
private |
Definition at line 46 of file GeofenceScheduler.hpp.
Referenced by endGeofenceCallback(), and onGeofenceInactive().
◆ mutex_
|
private |
Definition at line 41 of file GeofenceScheduler.hpp.
Referenced by addGeofence(), clearTimers(), endGeofenceCallback(), onGeofenceActive(), onGeofenceInactive(), and startGeofenceCallback().
◆ next_id_
|
private |
Definition at line 47 of file GeofenceScheduler.hpp.
Referenced by nextId().
◆ timerFactory_
|
private |
Definition at line 42 of file GeofenceScheduler.hpp.
Referenced by GeofenceScheduler(), addGeofence(), endGeofenceCallback(), now(), and startGeofenceCallback().
◆ timers_
|
private |
Definition at line 43 of file GeofenceScheduler.hpp.
Referenced by addGeofence(), clearTimers(), endGeofenceCallback(), and startGeofenceCallback().
The documentation for this class was generated from the following files:
- carma_wm_ctrl/include/carma_wm_ctrl/GeofenceScheduler.hpp
- carma_wm_ctrl/src/GeofenceScheduler.cpp