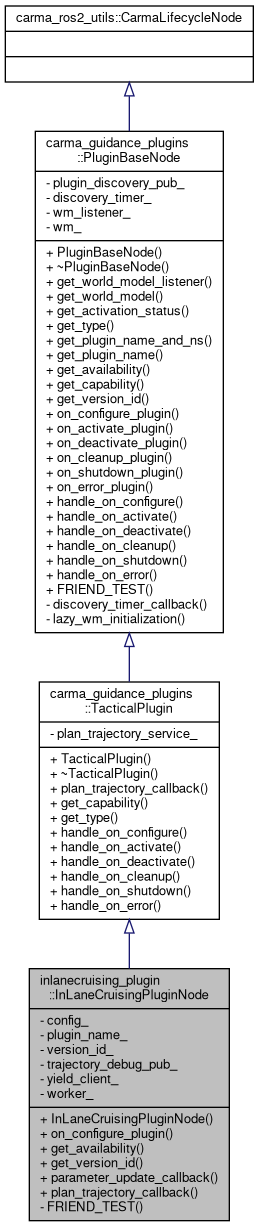
ROS node for the InLaneCruisingPlugin. More...
#include <inlanecruising_plugin_node.hpp>
Public Member Functions | |
| InLaneCruisingPluginNode (const rclcpp::NodeOptions &) | |
| Node constructor. More... | |
| carma_ros2_utils::CallbackReturn | on_configure_plugin () |
| Method which is triggered when this plugin is moved from the UNCONFIGURED to INACTIVE states. This method should be used to load parameters and is required to be implemented. More... | |
| bool | get_availability () override |
| Get the availability status of this plugin based on the current operating environment. Method must be overriden by extending classes. More... | |
| std::string | get_version_id () override final |
| Returns the version id of this plugin. More... | |
| rcl_interfaces::msg::SetParametersResult | parameter_update_callback (const std::vector< rclcpp::Parameter > ¶meters) |
| void | plan_trajectory_callback (std::shared_ptr< rmw_request_id_t > srv_header, carma_planning_msgs::srv::PlanTrajectory::Request::SharedPtr req, carma_planning_msgs::srv::PlanTrajectory::Response::SharedPtr resp) override |
| Extending class provided callback which should return a planned trajectory based on the provided trajectory planning request. More... | |
 Public Member Functions inherited from carma_guidance_plugins::TacticalPlugin Public Member Functions inherited from carma_guidance_plugins::TacticalPlugin | |
| TacticalPlugin (const rclcpp::NodeOptions &) | |
| TacticalPlugin constructor. More... | |
| virtual | ~TacticalPlugin ()=default |
| Virtual destructor for safe deletion. More... | |
| virtual void | plan_trajectory_callback (std::shared_ptr< rmw_request_id_t > srv_header, carma_planning_msgs::srv::PlanTrajectory::Request::SharedPtr req, carma_planning_msgs::srv::PlanTrajectory::Response::SharedPtr resp)=0 |
| Extending class provided callback which should return a planned trajectory based on the provided trajectory planning request. More... | |
| std::string | get_capability () override |
| Get the capability string representing this plugins capabilities Method must be overriden by extending classes. Expectation is that abstract plugin type parent classes will provide a default implementation. More... | |
| uint8_t | get_type () override final |
| Returns the type of this plugin according to the carma_planning_msgs::Plugin type enum. Extending classes for the specific type should override this method. More... | |
| carma_ros2_utils::CallbackReturn | handle_on_configure (const rclcpp_lifecycle::State &) override final |
| carma_ros2_utils::CallbackReturn | handle_on_activate (const rclcpp_lifecycle::State &) override final |
| carma_ros2_utils::CallbackReturn | handle_on_deactivate (const rclcpp_lifecycle::State &) override final |
| carma_ros2_utils::CallbackReturn | handle_on_cleanup (const rclcpp_lifecycle::State &) override final |
| carma_ros2_utils::CallbackReturn | handle_on_shutdown (const rclcpp_lifecycle::State &) override final |
| carma_ros2_utils::CallbackReturn | handle_on_error (const rclcpp_lifecycle::State &, const std::string &exception_string) override final |
| Public Member Functions inherited from carma_guidance_plugins::PluginBaseNode | |
| PluginBaseNode (const rclcpp::NodeOptions &) | |
| PluginBaseNode constructor. More... | |
| virtual | ~PluginBaseNode ()=default |
| Virtual destructor for safe deletion. More... | |
| virtual std::shared_ptr< carma_wm::WMListener > | get_world_model_listener () final |
| Method to return the default world model listener provided as a convience by this base class If this method or get_world_model() are not called then the world model remains uninitialized and will not create unnecessary subscriptions. More... | |
| virtual carma_wm::WorldModelConstPtr | get_world_model () final |
| Method to return the default world model provided as a convience by this base class If this method or get_world_model_listener() are not called then the world model remains uninitialized and will not create unnecessary subscriptions. More... | |
| virtual bool | get_activation_status () final |
| Returns the activation status of this plugin. The plugins API callbacks will only be triggered when this method returns true. More... | |
| virtual uint8_t | get_type () |
| Returns the type of this plugin according to the carma_planning_msgs::Plugin type enum. Extending classes for the specific type should override this method. More... | |
| std::string | get_plugin_name_and_ns () const |
| Return the name of this plugin with namespace. NOTE: If only the name of the plugin is required, use get_plugin_name() More... | |
| std::string | get_plugin_name () const |
| Return the name of this plugin. More... | |
| virtual bool | get_availability ()=0 |
| Get the availability status of this plugin based on the current operating environment. Method must be overriden by extending classes. More... | |
| virtual std::string | get_capability ()=0 |
| Get the capability string representing this plugins capabilities Method must be overriden by extending classes. Expectation is that abstract plugin type parent classes will provide a default implementation. More... | |
| virtual std::string | get_version_id ()=0 |
| Returns the version id of this plugin. More... | |
| virtual carma_ros2_utils::CallbackReturn | on_configure_plugin ()=0 |
| Method which is triggered when this plugin is moved from the UNCONFIGURED to INACTIVE states. This method should be used to load parameters and is required to be implemented. More... | |
| virtual carma_ros2_utils::CallbackReturn | on_activate_plugin () |
| Method which is triggered when this plugin is moved from the INACTIVE to ACTIVE states. This method should be used to prepare for future callbacks for plugin's capabilites. More... | |
| virtual carma_ros2_utils::CallbackReturn | on_deactivate_plugin () |
| Method which is triggered when this plugin is moved from the ACTIVE to INACTIVE states. This method should be used to disable any functionality which should cease execution when plugin is inactive. More... | |
| virtual carma_ros2_utils::CallbackReturn | on_cleanup_plugin () |
| Method which is triggered when this plugin is moved from the INACTIVE to UNCONFIGURED states. This method should be used to fully reset the plugin such that a future call to on_configure_plugin would leave the plugin in a fresh state as though just launched. More... | |
| virtual carma_ros2_utils::CallbackReturn | on_shutdown_plugin () |
| Method which is triggered when this plugin is moved from any state to FINALIZED This method should be used to generate any shutdown logs or final cleanup. More... | |
| virtual carma_ros2_utils::CallbackReturn | on_error_plugin (const std::string &exception_string) |
| Method which is triggered when an unhandled exception occurs in this plugin This method should be used to cleanup such that the plugin could be moved to UNCONFIGURED state if possible. More... | |
| carma_ros2_utils::CallbackReturn | handle_on_configure (const rclcpp_lifecycle::State &) override |
| carma_ros2_utils::CallbackReturn | handle_on_activate (const rclcpp_lifecycle::State &) override |
| carma_ros2_utils::CallbackReturn | handle_on_deactivate (const rclcpp_lifecycle::State &) override |
| carma_ros2_utils::CallbackReturn | handle_on_cleanup (const rclcpp_lifecycle::State &) override |
| carma_ros2_utils::CallbackReturn | handle_on_shutdown (const rclcpp_lifecycle::State &) override |
| carma_ros2_utils::CallbackReturn | handle_on_error (const rclcpp_lifecycle::State &, const std::string &exception_string) override |
| FRIEND_TEST (carma_guidance_plugins_test, connections_test) | |
Private Member Functions | |
| FRIEND_TEST (InLaneCruisingPluginTest, rostest1) | |
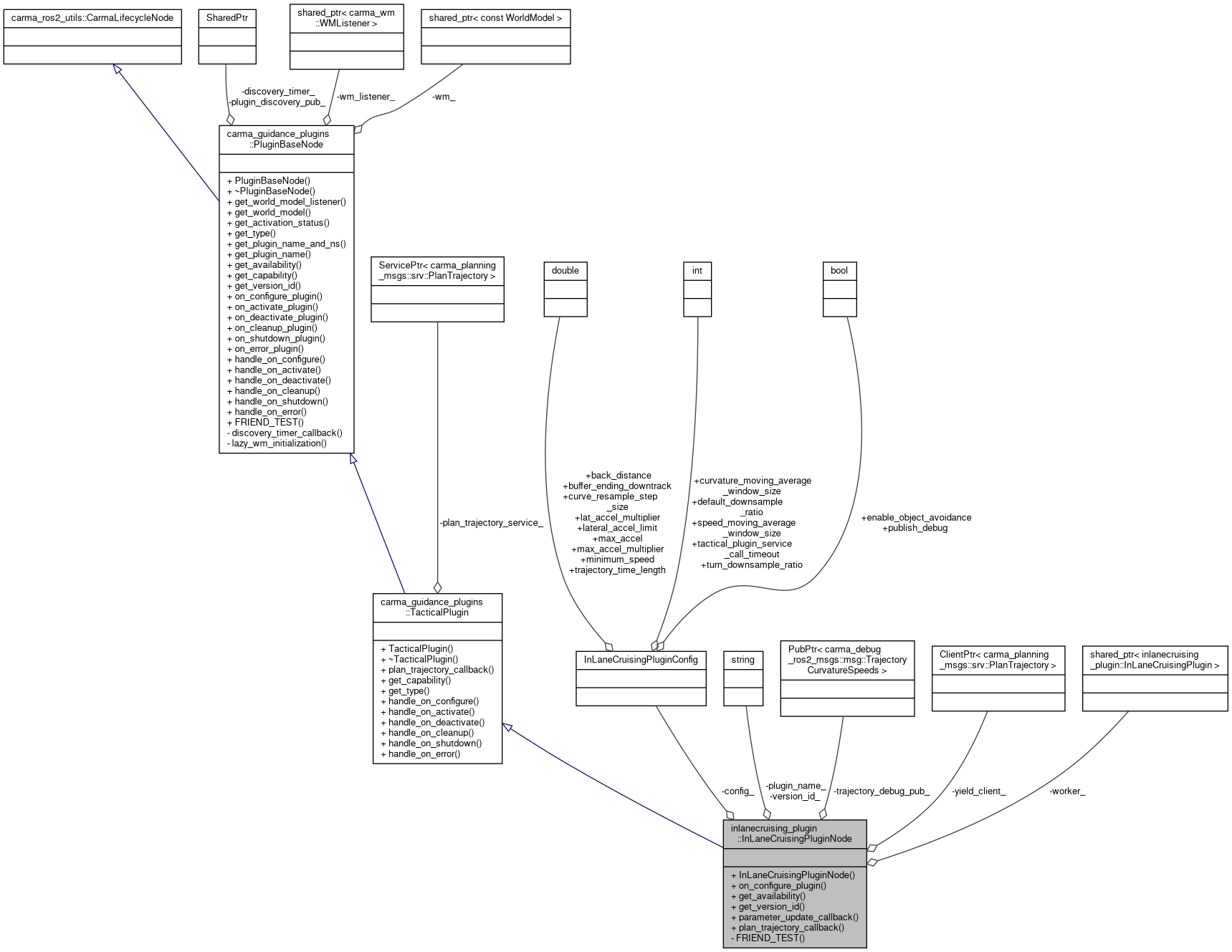
Private Attributes | |
| InLaneCruisingPluginConfig | config_ |
| std::string | plugin_name_ |
| std::string | version_id_ |
| carma_ros2_utils::PubPtr< carma_debug_ros2_msgs::msg::TrajectoryCurvatureSpeeds > | trajectory_debug_pub_ |
| carma_ros2_utils::ClientPtr< carma_planning_msgs::srv::PlanTrajectory > | yield_client_ |
| std::shared_ptr< InLaneCruisingPlugin > | worker_ |
Detailed Description
ROS node for the InLaneCruisingPlugin.
Definition at line 37 of file inlanecruising_plugin_node.hpp.
Constructor & Destructor Documentation
◆ InLaneCruisingPluginNode()
|
explicit |
Node constructor.
Definition at line 23 of file inlanecruising_plugin_node.cpp.
References InLaneCruisingPluginConfig::back_distance, InLaneCruisingPluginConfig::buffer_ending_downtrack, config_, InLaneCruisingPluginConfig::curvature_moving_average_window_size, InLaneCruisingPluginConfig::curve_resample_step_size, InLaneCruisingPluginConfig::default_downsample_ratio, InLaneCruisingPluginConfig::enable_object_avoidance, InLaneCruisingPluginConfig::lat_accel_multiplier, InLaneCruisingPluginConfig::lateral_accel_limit, InLaneCruisingPluginConfig::max_accel, InLaneCruisingPluginConfig::max_accel_multiplier, InLaneCruisingPluginConfig::minimum_speed, InLaneCruisingPluginConfig::speed_moving_average_window_size, InLaneCruisingPluginConfig::tactical_plugin_service_call_timeout, InLaneCruisingPluginConfig::trajectory_time_length, and InLaneCruisingPluginConfig::turn_downsample_ratio.
Member Function Documentation
◆ FRIEND_TEST()
|
private |
◆ get_availability()
|
overridevirtual |
Get the availability status of this plugin based on the current operating environment. Method must be overriden by extending classes.
- Returns
- This method should return true if the plugin's current understanding of the world means it would be capable of planning or executing its capability.
Implements carma_guidance_plugins::PluginBaseNode.
Definition at line 126 of file inlanecruising_plugin_node.cpp.
◆ get_version_id()
|
finaloverridevirtual |
Returns the version id of this plugin.
- Returns
- The version id represented as a string
Implements carma_guidance_plugins::PluginBaseNode.
Definition at line 131 of file inlanecruising_plugin_node.cpp.
References version_id_.
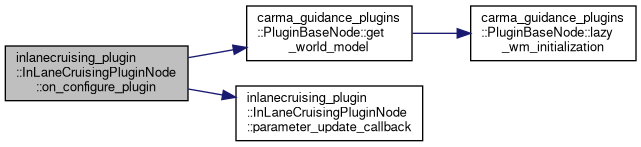
◆ on_configure_plugin()
|
virtual |
Method which is triggered when this plugin is moved from the UNCONFIGURED to INACTIVE states. This method should be used to load parameters and is required to be implemented.
- Returns
- SUCCESS, FAILURE, or ERROR. Transition to INACTIVE will only complete on SUCCESS.
Implements carma_guidance_plugins::PluginBaseNode.
Definition at line 47 of file inlanecruising_plugin_node.cpp.
References InLaneCruisingPluginConfig::back_distance, InLaneCruisingPluginConfig::buffer_ending_downtrack, config_, InLaneCruisingPluginConfig::curvature_moving_average_window_size, InLaneCruisingPluginConfig::curve_resample_step_size, InLaneCruisingPluginConfig::default_downsample_ratio, InLaneCruisingPluginConfig::enable_object_avoidance, carma_guidance_plugins::PluginBaseNode::get_world_model(), InLaneCruisingPluginConfig::lat_accel_multiplier, InLaneCruisingPluginConfig::lateral_accel_limit, InLaneCruisingPluginConfig::max_accel, InLaneCruisingPluginConfig::max_accel_multiplier, InLaneCruisingPluginConfig::minimum_speed, parameter_update_callback(), plugin_name_, InLaneCruisingPluginConfig::publish_debug, InLaneCruisingPluginConfig::speed_moving_average_window_size, InLaneCruisingPluginConfig::tactical_plugin_service_call_timeout, trajectory_debug_pub_, InLaneCruisingPluginConfig::trajectory_time_length, InLaneCruisingPluginConfig::turn_downsample_ratio, version_id_, worker_, and yield_client_.
◆ parameter_update_callback()
| rcl_interfaces::msg::SetParametersResult inlanecruising_plugin::InLaneCruisingPluginNode::parameter_update_callback | ( | const std::vector< rclcpp::Parameter > & | parameters | ) |
Definition at line 99 of file inlanecruising_plugin_node.cpp.
References InLaneCruisingPluginConfig::back_distance, InLaneCruisingPluginConfig::buffer_ending_downtrack, config_, InLaneCruisingPluginConfig::curvature_moving_average_window_size, InLaneCruisingPluginConfig::curve_resample_step_size, InLaneCruisingPluginConfig::default_downsample_ratio, InLaneCruisingPluginConfig::enable_object_avoidance, InLaneCruisingPluginConfig::lat_accel_multiplier, InLaneCruisingPluginConfig::max_accel_multiplier, InLaneCruisingPluginConfig::minimum_speed, InLaneCruisingPluginConfig::speed_moving_average_window_size, InLaneCruisingPluginConfig::trajectory_time_length, and InLaneCruisingPluginConfig::turn_downsample_ratio.
Referenced by on_configure_plugin().

◆ plan_trajectory_callback()
|
overridevirtual |
Extending class provided callback which should return a planned trajectory based on the provided trajectory planning request.
- Parameters
-
srv_header RCL header for services calls. Can usually be ignored by implementers. req The service request containing the maneuvers to plan trajectories for and current vehicle state resp The response containing the planned trajectory
Implements carma_guidance_plugins::TacticalPlugin.
Definition at line 136 of file inlanecruising_plugin_node.cpp.
References worker_.
Member Data Documentation
◆ config_
|
private |
Definition at line 65 of file inlanecruising_plugin_node.hpp.
Referenced by InLaneCruisingPluginNode(), on_configure_plugin(), and parameter_update_callback().
◆ plugin_name_
|
private |
Definition at line 67 of file inlanecruising_plugin_node.hpp.
Referenced by on_configure_plugin().
◆ trajectory_debug_pub_
|
private |
Definition at line 70 of file inlanecruising_plugin_node.hpp.
Referenced by on_configure_plugin().
◆ version_id_
|
private |
Definition at line 68 of file inlanecruising_plugin_node.hpp.
Referenced by get_version_id(), and on_configure_plugin().
◆ worker_
|
private |
Definition at line 76 of file inlanecruising_plugin_node.hpp.
Referenced by on_configure_plugin(), and plan_trajectory_callback().
◆ yield_client_
|
private |
Definition at line 73 of file inlanecruising_plugin_node.hpp.
Referenced by on_configure_plugin().
The documentation for this class was generated from the following files:
- inlanecruising_plugin/include/inlanecruising_plugin/inlanecruising_plugin_node.hpp
- inlanecruising_plugin/src/inlanecruising_plugin_node.cpp