Namespaces | |
| namespace | collision_detection |
| namespace | geometry |
| geometry namespace contains utility geometry functions which do not require the map or route provided by an active world model | |
| namespace | query |
| namespace | test |
| namespace | utils |
Classes | |
| class | CARMAWorldModel |
| Class which implements the WorldModel interface. In addition this class provides write access to the world model. Write access is achieved through setters for the Map and Route and getMutableMap(). NOTE: This class should NOT be used in runtime code by users and is exposed solely for use in unit tests where the WMListener class cannot be instantiated. More... | |
| class | IndexedDistanceMap |
| O(1) distance lookup structure for quickly accessing route distance information. NOTE: This structure is used internally in the world model and is not intended for use by WorldModel users. More... | |
| struct | LANE_DIRECTION |
| class | LaneletDowntrackPair |
| class | SignalizedIntersectionManager |
| This class manages and keeps track of all signalized intersections in the map. All of the SPAT and MAP standard's lane ids to lanelet id mapping is recorded here. NOTE: This class functions do not update the map given. More... | |
| class | TrackPos |
| Position in a track based coordinate system where the axis are downtrack and crosstrack. Positive crosstrack is to the left of the reference line. More... | |
| class | TrafficControl |
| class | WMListener |
| Class which provies automated subscription and threading support for the world model. More... | |
| class | WMListenerWorker |
| Backend logic class for WMListener. More... | |
| class | WorldModel |
| An interface which provides read access to the semantic map and route. This class is not thread safe. All units of distance are in meters. More... | |
Typedefs | |
| using | LaneletRoutePtr = std::shared_ptr< lanelet::routing::Route > |
| using | LaneletRouteConstPtr = std::shared_ptr< const lanelet::routing::Route > |
| using | LaneletRouteUPtr = std::unique_ptr< lanelet::routing::Route > |
| using | LaneletRouteUConstPtr = std::unique_ptr< const lanelet::routing::Route > |
| using | LaneletRoutingGraphPtr = std::shared_ptr< lanelet::routing::RoutingGraph > |
| using | LaneletRoutingGraphConstPtr = std::shared_ptr< const lanelet::routing::RoutingGraph > |
| using | LaneletRoutingGraphUPtr = std::unique_ptr< lanelet::routing::RoutingGraph > |
| using | LaneletRoutingGraphConstUPtr = std::unique_ptr< const lanelet::routing::RoutingGraph > |
| using | TrafficRulesConstPtr = std::shared_ptr< const lanelet::traffic_rules::TrafficRules > |
| using | TrafficRulesUConstPtr = std::unique_ptr< const lanelet::traffic_rules::TrafficRules > |
| using | WorldModelConstPtr = std::shared_ptr< const WorldModel > |
Enumerations | |
| enum class | SIGNAL_PHASE_PROCESSING : uint8_t { OFF = 0 , ON = 1 } |
| enum | LaneSection { LANE_AHEAD , LANE_BEHIND , LANE_FULL } |
| enum class | GeofenceType { INVALID , DIGITAL_SPEED_LIMIT , PASSING_CONTROL_LINE , REGION_ACCESS_RULE , DIGITAL_MINIMUM_GAP , DIRECTION_OF_TRAVEL , STOP_RULE , CARMA_TRAFFIC_LIGHT , SIGNALIZED_INTERSECTION } |
Functions | |
| void | toBinMsg (std::shared_ptr< carma_wm::TrafficControl > gf_ptr, autoware_lanelet2_msgs::msg::MapBin *msg) |
| void | fromBinMsg (const autoware_lanelet2_msgs::msg::MapBin &msg, std::shared_ptr< carma_wm::TrafficControl > gf_ptr, lanelet::LaneletMapPtr lanelet_map=nullptr) |
| GeofenceType | resolveGeofenceType (const std::string &rule_name) |
| void | logSignalizedIntersectionManager (const carma_wm::SignalizedIntersectionManager &sim) |
Detailed Description
This is a test library made for guidance unit tests. In general, it includes the following :
- Helper functions to create the world from scratch or extend the world in getGuidanceTestMap()
- addObstacle at a specified Cartesian or Trackpos point relative to specified lanelet Id
- set route by giving series of lanelet Id in the map (setRouteById)
- set speed of entire road (setSpeedLimit)
getGuidanceTestMap gives a simple one way, 3 lane map (25mph speed limit) with one static prebaked obstacle and 4 lanelets in a lane (if 2 stripes make up one lanelet):
|1203|1213|1223| | _ _ _ _ _| |1202| Ob |1222| | _ _ _ _ _| |1201|1211|1221| num = lanelet id hardcoded for easier testing | _ _ _ _ _| | = lane lines |1200|1210|1220| - - - = Lanelet boundary | | O = Default Obstacle
START_LINE
- NOTE: please look at the README for an example of how to use them
Typedef Documentation
◆ LaneletRouteConstPtr
| using carma_wm::LaneletRouteConstPtr = typedef std::shared_ptr<const lanelet::routing::Route> |
Definition at line 48 of file WorldModel.hpp.
◆ LaneletRoutePtr
| using carma_wm::LaneletRoutePtr = typedef std::shared_ptr<lanelet::routing::Route> |
Definition at line 47 of file WorldModel.hpp.
◆ LaneletRouteUConstPtr
| using carma_wm::LaneletRouteUConstPtr = typedef std::unique_ptr<const lanelet::routing::Route> |
Definition at line 50 of file WorldModel.hpp.
◆ LaneletRouteUPtr
| using carma_wm::LaneletRouteUPtr = typedef std::unique_ptr<lanelet::routing::Route> |
Definition at line 49 of file WorldModel.hpp.
◆ LaneletRoutingGraphConstPtr
| using carma_wm::LaneletRoutingGraphConstPtr = typedef std::shared_ptr<const lanelet::routing::RoutingGraph> |
Definition at line 53 of file WorldModel.hpp.
◆ LaneletRoutingGraphConstUPtr
| using carma_wm::LaneletRoutingGraphConstUPtr = typedef std::unique_ptr<const lanelet::routing::RoutingGraph> |
Definition at line 55 of file WorldModel.hpp.
◆ LaneletRoutingGraphPtr
| using carma_wm::LaneletRoutingGraphPtr = typedef std::shared_ptr<lanelet::routing::RoutingGraph> |
Definition at line 52 of file WorldModel.hpp.
◆ LaneletRoutingGraphUPtr
| using carma_wm::LaneletRoutingGraphUPtr = typedef std::unique_ptr<lanelet::routing::RoutingGraph> |
Definition at line 54 of file WorldModel.hpp.
◆ TrafficRulesConstPtr
| using carma_wm::TrafficRulesConstPtr = typedef std::shared_ptr<const lanelet::traffic_rules::TrafficRules> |
Definition at line 57 of file WorldModel.hpp.
◆ TrafficRulesUConstPtr
| using carma_wm::TrafficRulesUConstPtr = typedef std::unique_ptr<const lanelet::traffic_rules::TrafficRules> |
Definition at line 58 of file WorldModel.hpp.
◆ WorldModelConstPtr
| using carma_wm::WorldModelConstPtr = typedef std::shared_ptr<const WorldModel> |
Definition at line 454 of file WorldModel.hpp.
Enumeration Type Documentation
◆ GeofenceType
|
strong |
| Enumerator | |
|---|---|
| INVALID | |
| DIGITAL_SPEED_LIMIT | |
| PASSING_CONTROL_LINE | |
| REGION_ACCESS_RULE | |
| DIGITAL_MINIMUM_GAP | |
| DIRECTION_OF_TRAVEL | |
| STOP_RULE | |
| CARMA_TRAFFIC_LIGHT | |
| SIGNALIZED_INTERSECTION | |
Definition at line 28 of file WMListenerWorker.cpp.
◆ LaneSection
| Enumerator | |
|---|---|
| LANE_AHEAD | |
| LANE_BEHIND | |
| LANE_FULL | |
Definition at line 61 of file WorldModel.hpp.
◆ SIGNAL_PHASE_PROCESSING
|
strong |
| Enumerator | |
|---|---|
| OFF | |
| ON | |
Definition at line 47 of file SignalizedIntersectionManager.hpp.
Function Documentation
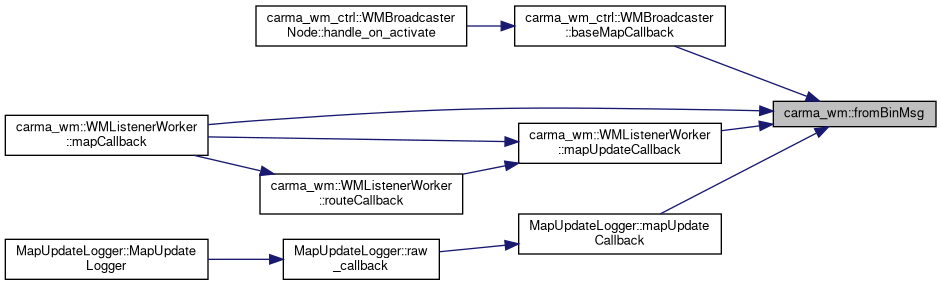
◆ fromBinMsg()
| void carma_wm::fromBinMsg | ( | const autoware_lanelet2_msgs::msg::MapBin & | msg, |
| std::shared_ptr< carma_wm::TrafficControl > | gf_ptr, | ||
| lanelet::LaneletMapPtr | lanelet_map = nullptr |
||
| ) |
[Converts Geofence binary ROS message to carma_wm::TrafficControl object. Similar implementation to lanelet2_extension::utility::message_conversion::fromBinMsg]
- Parameters
-
msg [ROS message for geofence] gf_ptr [Ptr to converted Geofence object] lanelet_map [Ptr to lanelet map to match incoming objects' memory address with that of existing objects' with same lanelet id] NOTE: When converting the geofence object, the converter only fills its relevant map update fields (update_list, remove_list) as the ROS msg doesn't hold any other data field in the object. NOTE: While main map update function needs to use lanelet_map, other utility use cases such as unit test or map update logger does not currently use lanelet_map and can use nullptr as input
Definition at line 40 of file TrafficControl.cpp.
Referenced by carma_wm_ctrl::WMBroadcaster::baseMapCallback(), carma_wm::WMListenerWorker::mapCallback(), carma_wm::WMListenerWorker::mapUpdateCallback(), and MapUpdateLogger::mapUpdateCallback().
◆ logSignalizedIntersectionManager()
| void carma_wm::logSignalizedIntersectionManager | ( | const carma_wm::SignalizedIntersectionManager & | sim | ) |
Definition at line 120 of file WMListenerWorker.cpp.
References carma_wm::SignalizedIntersectionManager::intersection_id_to_regem_id_, carma_wm::SignalizedIntersectionManager::signal_group_to_entry_lanelet_ids_, carma_wm::SignalizedIntersectionManager::signal_group_to_exit_lanelet_ids_, and carma_wm::SignalizedIntersectionManager::signal_group_to_traffic_light_id_.
Referenced by carma_wm::WMListenerWorker::mapUpdateCallback().

◆ resolveGeofenceType()
| GeofenceType carma_wm::resolveGeofenceType | ( | const std::string & | rule_name | ) |
Definition at line 31 of file WMListenerWorker.cpp.
References CARMA_TRAFFIC_LIGHT, DIGITAL_MINIMUM_GAP, DIGITAL_SPEED_LIMIT, DIRECTION_OF_TRAVEL, INVALID, PASSING_CONTROL_LINE, REGION_ACCESS_RULE, SIGNALIZED_INTERSECTION, and STOP_RULE.
Referenced by carma_wm::WMListenerWorker::newRegemUpdateHelper().

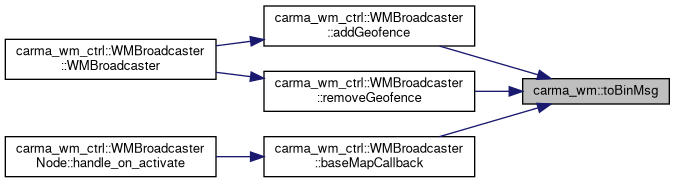
◆ toBinMsg()
| void carma_wm::toBinMsg | ( | std::shared_ptr< carma_wm::TrafficControl > | gf_ptr, |
| autoware_lanelet2_msgs::msg::MapBin * | msg | ||
| ) |
[Converts carma_wm::TrafficControl object to ROS message. Similar implementation to lanelet2_extension::utility::message_conversion::toBinMsg]
- Parameters
-
gf_ptr [Ptr to Geofence data] msg [converted ROS message. Only "data" field is filled] NOTE: When converting the geofence object, the converter fills its relevant map update fields (update_list, remove_list) to be read once received at the user
Definition at line 24 of file TrafficControl.cpp.
Referenced by carma_wm_ctrl::WMBroadcaster::addGeofence(), carma_wm_ctrl::WMBroadcaster::baseMapCallback(), and carma_wm_ctrl::WMBroadcaster::removeGeofence().