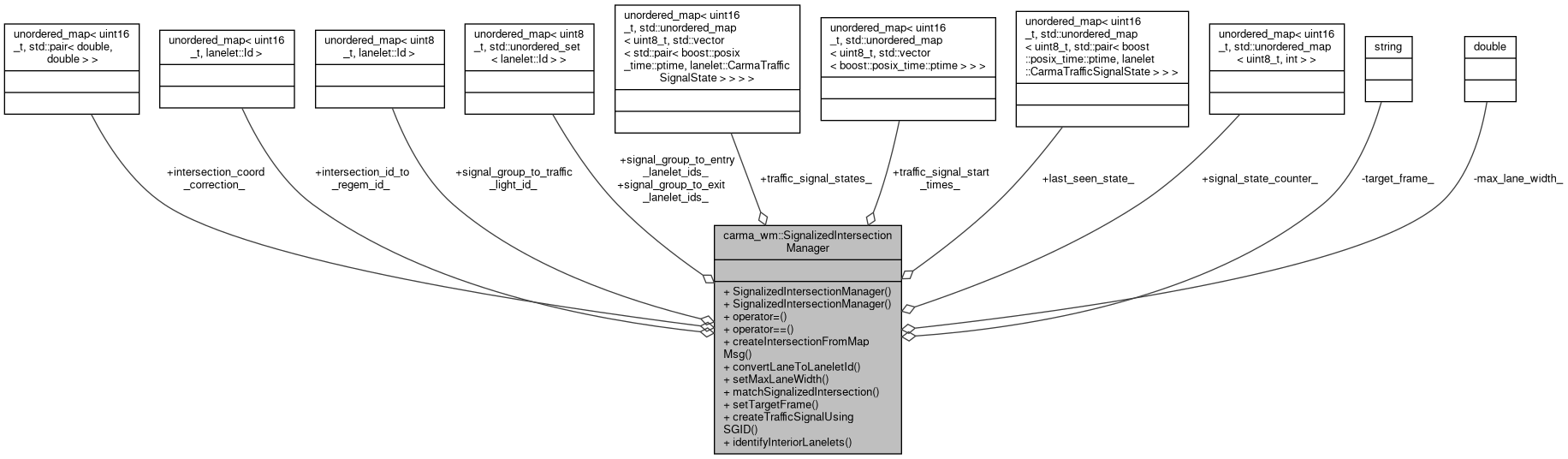
This class manages and keeps track of all signalized intersections in the map. All of the SPAT and MAP standard's lane ids to lanelet id mapping is recorded here. NOTE: This class functions do not update the map given. More...
#include <SignalizedIntersectionManager.hpp>
Public Member Functions | |
| SignalizedIntersectionManager () | |
| SignalizedIntersectionManager (const SignalizedIntersectionManager &other) | |
| Copy constructor that copies everything except the traffic signal states. This is to keep the states although the map is updated or a similar event happened NOTE: The function does not update the map with new elements. More... | |
| SignalizedIntersectionManager & | operator= (SignalizedIntersectionManager other) |
| Assignment operator that copies everything except the traffic signal states. This is to keep the states although the map is updated or a similar event happened NOTE: The function does not update the map with new elements. More... | |
| bool | operator== (const SignalizedIntersectionManager &rhs) |
| Equality operator that checks if every mapping are same except the traffic signal states. This is to keep the states although the map is updated or a similar event happened NOTE: The function does not update the map with new elements. More... | |
| void | createIntersectionFromMapMsg (std::vector< lanelet::SignalizedIntersectionPtr > &intersections, std::vector< lanelet::CarmaTrafficSignalPtr > &traffic_signals, const carma_v2x_msgs::msg::MapData &map_msg, const std::shared_ptr< lanelet::LaneletMap > &map, std::shared_ptr< const lanelet::routing::RoutingGraph > routing_graph) |
| Create relevant signalized intersection and carma traffic signals based on the MAP.msg and the lanelet_map NOTE: The function does not update the map with new elements. More... | |
| void | convertLaneToLaneletId (std::unordered_map< uint8_t, lanelet::Id > &entry, std::unordered_map< uint8_t, lanelet::Id > &exit, const carma_v2x_msgs::msg::IntersectionGeometry &intersection, const std::shared_ptr< lanelet::LaneletMap > &map, std::shared_ptr< const lanelet::routing::RoutingGraph > current_routing_graph) |
| Returns mapping of MAP lane id to lanelet id for the given map and intersection.msg in the MAP.msg. This function also records signal_group_id_to its own lanelet id, and also signal group to entry and exit lanelets id mappings. More... | |
| void | setMaxLaneWidth (double max_lane_width) |
| Sets the max lane width in meters. Map msg points are associated to a lanelet if they are within this distance to a lanelet as map msg points are guaranteed to apply to a single lane. More... | |
| lanelet::Id | matchSignalizedIntersection (const lanelet::Lanelets &entry_llts, const lanelet::Lanelets &exit_llts) |
| Returns existing signalized intersection with same entry and exit llts if exists. More... | |
| void | setTargetFrame (const std::string &target_frame) |
| Saves the georeference string to be used for converting MAP.msg coordinates. More... | |
| std::shared_ptr< lanelet::CarmaTrafficSignal > | createTrafficSignalUsingSGID (uint8_t signal_group_id, const lanelet::Lanelets &entry_lanelets, const lanelet::Lanelets &exit_lanelets) |
| Returns carma traffic signal and saves all id relevant id mappings (signal group to lanelet id) internally. More... | |
| lanelet::Lanelets | identifyInteriorLanelets (const lanelet::Lanelets &entry_llts, const std::shared_ptr< lanelet::LaneletMap > &map) |
| Returns carma traffic signal and saves all id relevant id mappings (signal group to lanelet id) internally. More... | |
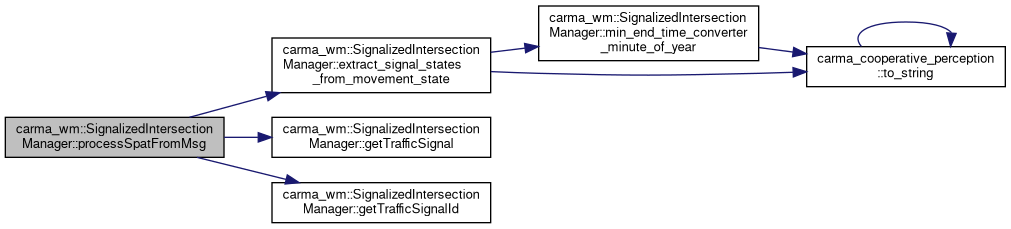
| void | processSpatFromMsg (const carma_v2x_msgs::msg::SPAT &spat_msg, const std::shared_ptr< lanelet::LaneletMap > &semantic_map) |
| processSpatFromMsg update map's traffic light states with SPAT msg NOTE: This is enabled in the individual nodes through wm_listener's setWMSpatProcessingState() More... | |
| std::tuple< std::vector< std::pair< boost::posix_time::ptime, lanelet::CarmaTrafficSignalState > >, std::vector< boost::posix_time::ptime > > | extract_signal_states_from_movement_state (const carma_v2x_msgs::msg::IntersectionState &curr_intersection, const carma_v2x_msgs::msg::MovementState ¤t_movement_state) |
| Extract tuple of 1) vector of pair of traffic signal states' min_end_time and their states, which is mainly used by CARMA to comply with traffic signals. 2) vector of traffic signal states' start_times that match in order. More... | |
| boost::posix_time::ptime | min_end_time_converter_minute_of_year (boost::posix_time::ptime min_end_time, bool moy_exists, uint32_t moy=0, bool is_simulation=true, bool use_real_time_spat_in_sim=false) |
| update minimum end time to account for minute of the year More... | |
| lanelet::Id | getTrafficSignalId (uint16_t intersection_id, uint8_t signal_id) |
| helper for traffic signal Id More... | |
| lanelet::CarmaTrafficSignalPtr | getTrafficSignal (const lanelet::Id &id, const std::shared_ptr< lanelet::LaneletMap > &semantic_map) const |
| helper for getting traffic signal with given lanelet::Id More... | |
| void | logInfoOnce (const std::string &message) const |
| Log an info message only once per unique message. More... | |
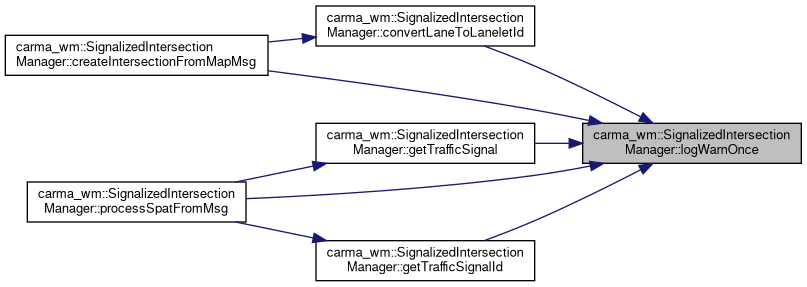
| void | logWarnOnce (const std::string &message) const |
| Log a warning message only once per unique message. More... | |
Public Attributes | |
| std::unordered_map< uint16_t, std::vector< lanelet::Point3d > > | intersection_nodes_ |
| std::unordered_map< uint16_t, std::pair< double, double > > | intersection_coord_correction_ |
| std::unordered_map< uint16_t, lanelet::Id > | intersection_id_to_regem_id_ |
| std::unordered_map< lanelet::Id, uint16_t > | regem_id_to_intersection_id_ |
| std::unordered_map< uint8_t, lanelet::Id > | signal_group_to_traffic_light_id_ |
| std::unordered_map< uint8_t, std::unordered_set< lanelet::Id > > | signal_group_to_exit_lanelet_ids_ |
| std::unordered_map< uint8_t, std::unordered_set< lanelet::Id > > | signal_group_to_entry_lanelet_ids_ |
| std::optional< rclcpp::Time > | ros1_clock_ = std::nullopt |
| std::optional< rclcpp::Time > | simulation_clock_ = std::nullopt |
| bool | use_sim_time_ |
| bool | use_real_time_spat_in_sim_ |
| SIGNAL_PHASE_PROCESSING | spat_processor_state_ = SIGNAL_PHASE_PROCESSING::OFF |
| std::set< std::string > | previous_busy_log_streams_ |
Private Attributes | |
| std::string | target_frame_ = "" |
| double | max_lane_width_ = 4 |
Detailed Description
This class manages and keeps track of all signalized intersections in the map. All of the SPAT and MAP standard's lane ids to lanelet id mapping is recorded here. NOTE: This class functions do not update the map given.
Definition at line 59 of file SignalizedIntersectionManager.hpp.
Constructor & Destructor Documentation
◆ SignalizedIntersectionManager() [1/2]
|
inline |
Definition at line 63 of file SignalizedIntersectionManager.hpp.
◆ SignalizedIntersectionManager() [2/2]
| carma_wm::SignalizedIntersectionManager::SignalizedIntersectionManager | ( | const SignalizedIntersectionManager & | other | ) |
Copy constructor that copies everything except the traffic signal states. This is to keep the states although the map is updated or a similar event happened NOTE: The function does not update the map with new elements.
- Parameters
-
[out] other manager
Definition at line 477 of file SignalizedIntersectionManager.cpp.
References intersection_coord_correction_, intersection_id_to_regem_id_, signal_group_to_entry_lanelet_ids_, signal_group_to_exit_lanelet_ids_, and signal_group_to_traffic_light_id_.
Member Function Documentation
◆ convertLaneToLaneletId()
| void carma_wm::SignalizedIntersectionManager::convertLaneToLaneletId | ( | std::unordered_map< uint8_t, lanelet::Id > & | entry, |
| std::unordered_map< uint8_t, lanelet::Id > & | exit, | ||
| const carma_v2x_msgs::msg::IntersectionGeometry & | intersection, | ||
| const std::shared_ptr< lanelet::LaneletMap > & | map, | ||
| std::shared_ptr< const lanelet::routing::RoutingGraph > | current_routing_graph | ||
| ) |
Returns mapping of MAP lane id to lanelet id for the given map and intersection.msg in the MAP.msg. This function also records signal_group_id_to its own lanelet id, and also signal group to entry and exit lanelets id mappings.
- Parameters
-
[out] entry lane id to lanelet id mappings to return [out] exit lane id to lanelet id mappings to return intersection MAP.msg that consists all static data portion of the intersection map lanelet_map to check routing_graph of the lanelet map to accurately detect lanes
- Exceptions
-
invalid_argument if given coordinates in the msg doesn't exist in the map TODO: Need to think about error buffer in the future. Map msgs are made from google maps or open streets maps normally so this function might run into some errors from that.
Definition at line 58 of file SignalizedIntersectionManager.cpp.
References carma_wm::LANE_DIRECTION::EGRESS, carma_wm::query::getAffectedLaneletOrAreas(), process_bag::i, carma_wm::LANE_DIRECTION::INGRESS, intersection_coord_correction_, intersection_nodes_, logWarnOnce(), max_lane_width_, signal_group_to_entry_lanelet_ids_, signal_group_to_exit_lanelet_ids_, target_frame_, and carma_cooperative_perception::to_string().
Referenced by createIntersectionFromMapMsg().


◆ createIntersectionFromMapMsg()
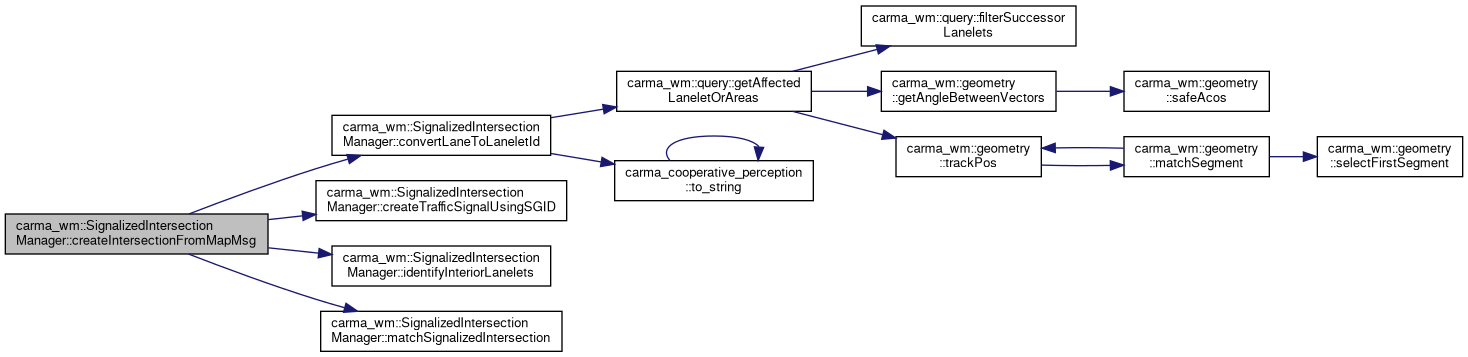
| void carma_wm::SignalizedIntersectionManager::createIntersectionFromMapMsg | ( | std::vector< lanelet::SignalizedIntersectionPtr > & | intersections, |
| std::vector< lanelet::CarmaTrafficSignalPtr > & | traffic_signals, | ||
| const carma_v2x_msgs::msg::MapData & | map_msg, | ||
| const std::shared_ptr< lanelet::LaneletMap > & | map, | ||
| std::shared_ptr< const lanelet::routing::RoutingGraph > | routing_graph | ||
| ) |
Create relevant signalized intersection and carma traffic signals based on the MAP.msg and the lanelet_map NOTE: The function does not update the map with new elements.
- Parameters
-
[out] intersections to return [out] traffic_signals to return map_msg MAP.msg that consists all static data portion of the intersection map lanelet_map to check routing_graph of the lanelet map to accurately detect lanes
Definition at line 359 of file SignalizedIntersectionManager.cpp.
References convertLaneToLaneletId(), createTrafficSignalUsingSGID(), identifyInteriorLanelets(), intersection_id_to_regem_id_, logWarnOnce(), matchSignalizedIntersection(), regem_id_to_intersection_id_, signal_group_to_entry_lanelet_ids_, signal_group_to_exit_lanelet_ids_, signal_group_to_traffic_light_id_, target_frame_, and carma_cooperative_perception::to_string().
◆ createTrafficSignalUsingSGID()
| std::shared_ptr< lanelet::CarmaTrafficSignal > carma_wm::SignalizedIntersectionManager::createTrafficSignalUsingSGID | ( | uint8_t | signal_group_id, |
| const lanelet::Lanelets & | entry_lanelets, | ||
| const lanelet::Lanelets & | exit_lanelets | ||
| ) |
Returns carma traffic signal and saves all id relevant id mappings (signal group to lanelet id) internally.
- Parameters
-
signal_group_id of the traffic signal exit_llts of the signal_group entry_llts of the signal_group
- Returns
- traffic signal corresponding to the signal group
Definition at line 331 of file SignalizedIntersectionManager.cpp.
References signal_group_to_entry_lanelet_ids_, signal_group_to_exit_lanelet_ids_, and signal_group_to_traffic_light_id_.
Referenced by createIntersectionFromMapMsg().

◆ extract_signal_states_from_movement_state()
| std::tuple< std::vector< std::pair< boost::posix_time::ptime, lanelet::CarmaTrafficSignalState > >, std::vector< boost::posix_time::ptime > > carma_wm::SignalizedIntersectionManager::extract_signal_states_from_movement_state | ( | const carma_v2x_msgs::msg::IntersectionState & | curr_intersection, |
| const carma_v2x_msgs::msg::MovementState & | current_movement_state | ||
| ) |
Extract tuple of 1) vector of pair of traffic signal states' min_end_time and their states, which is mainly used by CARMA to comply with traffic signals. 2) vector of traffic signal states' start_times that match in order.
- Parameters
-
curr_intersection carma_v2x_msgs::msg::IntersectionState from SPAT current_movement_state carma_v2x_msgs::msg::MovementState from SPAT
- Returns
- tuple of 2 vectors. 1) vector of min_end_time and state pairs 2) vector of start_time
Definition at line 658 of file SignalizedIntersectionManager.cpp.
References min_end_time_converter_minute_of_year(), carma_cooperative_perception::to_string(), use_real_time_spat_in_sim_, and use_sim_time_.
Referenced by processSpatFromMsg().


◆ getTrafficSignal()
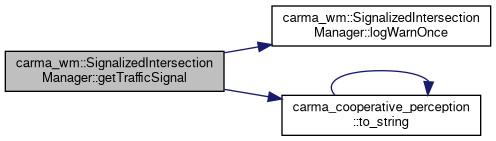
| lanelet::CarmaTrafficSignalPtr carma_wm::SignalizedIntersectionManager::getTrafficSignal | ( | const lanelet::Id & | id, |
| const std::shared_ptr< lanelet::LaneletMap > & | semantic_map | ||
| ) | const |
helper for getting traffic signal with given lanelet::Id
Definition at line 611 of file SignalizedIntersectionManager.cpp.
References logWarnOnce(), and carma_cooperative_perception::to_string().
Referenced by processSpatFromMsg().

◆ getTrafficSignalId()
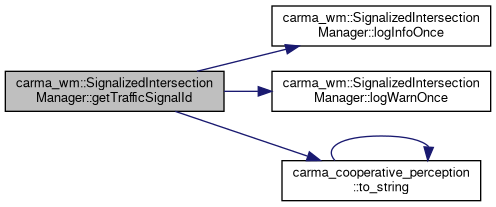
| lanelet::Id carma_wm::SignalizedIntersectionManager::getTrafficSignalId | ( | uint16_t | intersection_id, |
| uint8_t | signal_id | ||
| ) |
helper for traffic signal Id
Definition at line 574 of file SignalizedIntersectionManager.cpp.
References intersection_id_to_regem_id_, logInfoOnce(), logWarnOnce(), signal_group_to_traffic_light_id_, and carma_cooperative_perception::to_string().
Referenced by processSpatFromMsg().

◆ identifyInteriorLanelets()
| lanelet::Lanelets carma_wm::SignalizedIntersectionManager::identifyInteriorLanelets | ( | const lanelet::Lanelets & | entry_llts, |
| const std::shared_ptr< lanelet::LaneletMap > & | map | ||
| ) |
Returns carma traffic signal and saves all id relevant id mappings (signal group to lanelet id) internally.
- Parameters
-
signal_group_id of the traffic signal exit_llts of the signal_group entry_llts of the signal_group
- Returns
- traffic signal corresponding to the signal group
Definition at line 440 of file SignalizedIntersectionManager.cpp.
Referenced by createIntersectionFromMapMsg().

◆ logInfoOnce()
| void carma_wm::SignalizedIntersectionManager::logInfoOnce | ( | const std::string & | message | ) | const |
Log an info message only once per unique message.
- Parameters
-
message The message to log
Definition at line 550 of file SignalizedIntersectionManager.cpp.
References previous_busy_log_streams_.
Referenced by getTrafficSignalId().

◆ logWarnOnce()
| void carma_wm::SignalizedIntersectionManager::logWarnOnce | ( | const std::string & | message | ) | const |
Log a warning message only once per unique message.
- Parameters
-
message The message to log
Definition at line 564 of file SignalizedIntersectionManager.cpp.
References previous_busy_log_streams_.
Referenced by convertLaneToLaneletId(), createIntersectionFromMapMsg(), getTrafficSignal(), getTrafficSignalId(), and processSpatFromMsg().
◆ matchSignalizedIntersection()
| lanelet::Id carma_wm::SignalizedIntersectionManager::matchSignalizedIntersection | ( | const lanelet::Lanelets & | entry_llts, |
| const lanelet::Lanelets & | exit_llts | ||
| ) |
Returns existing signalized intersection with same entry and exit llts if exists.
- Parameters
-
entry_llts of the intersection exit_llts of the intersection
- Returns
- id of the matching intersection in the map, or lanelet::InvalId if none exists
Definition at line 270 of file SignalizedIntersectionManager.cpp.
Referenced by createIntersectionFromMapMsg().

◆ min_end_time_converter_minute_of_year()
| boost::posix_time::ptime carma_wm::SignalizedIntersectionManager::min_end_time_converter_minute_of_year | ( | boost::posix_time::ptime | min_end_time, |
| bool | moy_exists, | ||
| uint32_t | moy = 0, |
||
| bool | is_simulation = true, |
||
| bool | use_real_time_spat_in_sim = false |
||
| ) |
update minimum end time to account for minute of the year
- Parameters
-
min_end_time minimum end time of the spat movement event list moy_exists tells weather minute of the year exist or not moy value of the minute of the year use_real_time_spat_in_sim Boolean to indicate if the incoming spat is based on wall clock. Required in edge cases where deployment in simulation is receiving SPaT messages based on wall clock.
Definition at line 700 of file SignalizedIntersectionManager.cpp.
References ros1_clock_, simulation_clock_, and carma_cooperative_perception::to_string().
Referenced by extract_signal_states_from_movement_state().


◆ operator=()
| SignalizedIntersectionManager & carma_wm::SignalizedIntersectionManager::operator= | ( | SignalizedIntersectionManager | other | ) |
Assignment operator that copies everything except the traffic signal states. This is to keep the states although the map is updated or a similar event happened NOTE: The function does not update the map with new elements.
- Parameters
-
[out] other manager
Definition at line 466 of file SignalizedIntersectionManager.cpp.
References intersection_coord_correction_, intersection_id_to_regem_id_, signal_group_to_entry_lanelet_ids_, signal_group_to_exit_lanelet_ids_, and signal_group_to_traffic_light_id_.
◆ operator==()
| bool carma_wm::SignalizedIntersectionManager::operator== | ( | const SignalizedIntersectionManager & | rhs | ) |
Equality operator that checks if every mapping are same except the traffic signal states. This is to keep the states although the map is updated or a similar event happened NOTE: The function does not update the map with new elements.
- Parameters
-
[out] rhs manager
Definition at line 35 of file SignalizedIntersectionManager.cpp.
References intersection_id_to_regem_id_, signal_group_to_entry_lanelet_ids_, signal_group_to_exit_lanelet_ids_, and signal_group_to_traffic_light_id_.
◆ processSpatFromMsg()
| void carma_wm::SignalizedIntersectionManager::processSpatFromMsg | ( | const carma_v2x_msgs::msg::SPAT & | spat_msg, |
| const std::shared_ptr< lanelet::LaneletMap > & | semantic_map | ||
| ) |
processSpatFromMsg update map's traffic light states with SPAT msg NOTE: This is enabled in the individual nodes through wm_listener's setWMSpatProcessingState()
- Parameters
-
spat_msg Msg to update with lanelet_map to update the regulatory elements according to internal signals recorded
Definition at line 486 of file SignalizedIntersectionManager.cpp.
References extract_signal_states_from_movement_state(), getTrafficSignal(), getTrafficSignalId(), logWarnOnce(), carma_wm::OFF, and spat_processor_state_.
◆ setMaxLaneWidth()
| void carma_wm::SignalizedIntersectionManager::setMaxLaneWidth | ( | double | max_lane_width | ) |
Sets the max lane width in meters. Map msg points are associated to a lanelet if they are within this distance to a lanelet as map msg points are guaranteed to apply to a single lane.
Definition at line 30 of file SignalizedIntersectionManager.cpp.
References max_lane_width_.
◆ setTargetFrame()
| void carma_wm::SignalizedIntersectionManager::setTargetFrame | ( | const std::string & | target_frame | ) |
Saves the georeference string to be used for converting MAP.msg coordinates.
- Parameters
-
target_frame PROJ string of the map
Definition at line 25 of file SignalizedIntersectionManager.cpp.
References target_frame_.
Member Data Documentation
◆ intersection_coord_correction_
| std::unordered_map<uint16_t, std::pair<double, double> > carma_wm::SignalizedIntersectionManager::intersection_coord_correction_ |
Definition at line 214 of file SignalizedIntersectionManager.hpp.
Referenced by SignalizedIntersectionManager(), convertLaneToLaneletId(), and operator=().
◆ intersection_id_to_regem_id_
| std::unordered_map<uint16_t, lanelet::Id> carma_wm::SignalizedIntersectionManager::intersection_id_to_regem_id_ |
Definition at line 217 of file SignalizedIntersectionManager.hpp.
Referenced by SignalizedIntersectionManager(), createIntersectionFromMapMsg(), getTrafficSignalId(), boost::serialization::load(), carma_wm::logSignalizedIntersectionManager(), operator=(), operator==(), and boost::serialization::save().
◆ intersection_nodes_
| std::unordered_map<uint16_t, std::vector<lanelet::Point3d> > carma_wm::SignalizedIntersectionManager::intersection_nodes_ |
Definition at line 211 of file SignalizedIntersectionManager.hpp.
Referenced by convertLaneToLaneletId().
◆ max_lane_width_
|
private |
Definition at line 246 of file SignalizedIntersectionManager.hpp.
Referenced by convertLaneToLaneletId(), and setMaxLaneWidth().
◆ previous_busy_log_streams_
|
mutable |
Definition at line 240 of file SignalizedIntersectionManager.hpp.
Referenced by logInfoOnce(), and logWarnOnce().
◆ regem_id_to_intersection_id_
| std::unordered_map<lanelet::Id, uint16_t> carma_wm::SignalizedIntersectionManager::regem_id_to_intersection_id_ |
Definition at line 220 of file SignalizedIntersectionManager.hpp.
Referenced by createIntersectionFromMapMsg().
◆ ros1_clock_
| std::optional<rclcpp::Time> carma_wm::SignalizedIntersectionManager::ros1_clock_ = std::nullopt |
Definition at line 231 of file SignalizedIntersectionManager.hpp.
Referenced by min_end_time_converter_minute_of_year(), and carma_wm::CARMAWorldModel::setRos1Clock().
◆ signal_group_to_entry_lanelet_ids_
| std::unordered_map<uint8_t, std::unordered_set<lanelet::Id> > carma_wm::SignalizedIntersectionManager::signal_group_to_entry_lanelet_ids_ |
Definition at line 229 of file SignalizedIntersectionManager.hpp.
Referenced by SignalizedIntersectionManager(), convertLaneToLaneletId(), createIntersectionFromMapMsg(), createTrafficSignalUsingSGID(), boost::serialization::load(), carma_wm::logSignalizedIntersectionManager(), operator=(), operator==(), and boost::serialization::save().
◆ signal_group_to_exit_lanelet_ids_
| std::unordered_map<uint8_t, std::unordered_set<lanelet::Id> > carma_wm::SignalizedIntersectionManager::signal_group_to_exit_lanelet_ids_ |
Definition at line 226 of file SignalizedIntersectionManager.hpp.
Referenced by SignalizedIntersectionManager(), convertLaneToLaneletId(), createIntersectionFromMapMsg(), createTrafficSignalUsingSGID(), boost::serialization::load(), carma_wm::logSignalizedIntersectionManager(), operator=(), operator==(), and boost::serialization::save().
◆ signal_group_to_traffic_light_id_
| std::unordered_map<uint8_t, lanelet::Id> carma_wm::SignalizedIntersectionManager::signal_group_to_traffic_light_id_ |
Definition at line 223 of file SignalizedIntersectionManager.hpp.
Referenced by SignalizedIntersectionManager(), createIntersectionFromMapMsg(), createTrafficSignalUsingSGID(), getTrafficSignalId(), boost::serialization::load(), carma_wm::logSignalizedIntersectionManager(), operator=(), operator==(), and boost::serialization::save().
◆ simulation_clock_
| std::optional<rclcpp::Time> carma_wm::SignalizedIntersectionManager::simulation_clock_ = std::nullopt |
Definition at line 232 of file SignalizedIntersectionManager.hpp.
Referenced by min_end_time_converter_minute_of_year(), and carma_wm::CARMAWorldModel::setSimulationClock().
◆ spat_processor_state_
| SIGNAL_PHASE_PROCESSING carma_wm::SignalizedIntersectionManager::spat_processor_state_ = SIGNAL_PHASE_PROCESSING::OFF |
Definition at line 236 of file SignalizedIntersectionManager.hpp.
Referenced by processSpatFromMsg().
◆ target_frame_
|
private |
Definition at line 243 of file SignalizedIntersectionManager.hpp.
Referenced by convertLaneToLaneletId(), createIntersectionFromMapMsg(), and setTargetFrame().
◆ use_real_time_spat_in_sim_
| bool carma_wm::SignalizedIntersectionManager::use_real_time_spat_in_sim_ |
Definition at line 235 of file SignalizedIntersectionManager.hpp.
Referenced by extract_signal_states_from_movement_state().
◆ use_sim_time_
| bool carma_wm::SignalizedIntersectionManager::use_sim_time_ |
Definition at line 234 of file SignalizedIntersectionManager.hpp.
Referenced by extract_signal_states_from_movement_state().
The documentation for this class was generated from the following files:
- carma_wm/include/carma_wm/SignalizedIntersectionManager.hpp
- carma_wm/src/SignalizedIntersectionManager.cpp