Classes | |
| struct | AccelerationSet4Way |
| struct | DDateTime |
| class | DetectionListVizNode |
| class | ExternalObjectListToDetectionListNode |
| class | ExternalObjectListToSdsmNode |
| struct | Heading |
| class | HostVehicleFilterNode |
| struct | MapCoordinate |
| struct | MeasurementTimeOffset |
| struct | MetricSe2 |
| Calculates distance between a point and detection in SE(2) (special Euclidean) space. More... | |
| class | Month |
| struct | MotionModelMapping |
| class | MultipleObjectTrackerNode |
| struct | Position3D |
| struct | PositionOffsetXYZ |
| class | SdsmToDetectionListConfig |
| class | SdsmToDetectionListNode |
| struct | SemanticDistance2dScore |
| Calculate 2D Euclidean distance between track and detection. More... | |
| struct | Speed |
| class | TrackListToExternalObjectListNode |
| struct | UtmCoordinate |
| Represents a position using UTM coordinates. More... | |
| struct | UtmDisplacement |
| Represent a displacement from a UTM coordinate. More... | |
| struct | UtmZone |
| struct | Wgs84Coordinate |
| Represents a position using WGS-84 coordinates. More... | |
Typedefs | |
| using | Detection = std::variant< multiple_object_tracking::CtrvDetection, multiple_object_tracking::CtraDetection > |
| using | Track = std::variant< multiple_object_tracking::CtrvTrack, multiple_object_tracking::CtraTrack > |
Enumerations | |
| enum class | Hemisphere { kNorth , kSouth } |
Functions | |
| auto | transform_from_map_to_utm (carma_cooperative_perception_interfaces::msg::DetectionList detection_list, const std::string &map_origin) -> carma_cooperative_perception_interfaces::msg::DetectionList |
| constexpr auto | operator+= (UtmCoordinate &coordinate, const UtmDisplacement &displacement) -> UtmCoordinate & |
| Addition-assignment operator overload. More... | |
| constexpr auto | operator+ (UtmCoordinate coordinate, const UtmDisplacement &displacement) -> UtmCoordinate |
| Addition operator overload. More... | |
| constexpr auto | operator+ (const UtmDisplacement &displacement, UtmCoordinate coordinate) -> UtmCoordinate |
| Addition operator overload. More... | |
| constexpr auto | operator-= (UtmCoordinate &coordinate, const UtmDisplacement &displacement) -> UtmCoordinate & |
| Subtraction-assignment operator overload. More... | |
| constexpr auto | operator- (UtmCoordinate coordinate, const UtmDisplacement &displacement) -> UtmCoordinate |
| Subtraction operator overload. More... | |
| constexpr auto | operator- (const UtmDisplacement &displacement, UtmCoordinate coordinate) -> UtmCoordinate |
| Subtraction operator overload. More... | |
| auto | calculate_utm_zone (const Wgs84Coordinate &coordinate) -> UtmZone |
| Get the UTM zone number from a WGS-84 coordinate. More... | |
| auto | project_to_carma_map (const Wgs84Coordinate &coordinate, std::string_view proj_string) -> MapCoordinate |
| auto | project_to_utm (const Wgs84Coordinate &coordinate) -> UtmCoordinate |
| Projects a Wgs84Coordinate to its corresponding UTM zone. More... | |
| auto | calculate_grid_convergence (const Wgs84Coordinate &position, const UtmZone &zone) -> units::angle::degree_t |
| Calculate grid convergence at a given position. More... | |
| auto | calculate_grid_convergence (const Wgs84Coordinate &position, std::string_view georeference) -> units::angle::degree_t |
| auto | euclidean_distance_squared (const geometry_msgs::msg::Pose &a, const geometry_msgs::msg::Pose &b) -> double |
| auto | to_time_msg (const DDateTime &d_date_time, bool is_simulation) -> builtin_interfaces::msg::Time |
| auto | calc_detection_time_stamp (DDateTime d_date_time, const MeasurementTimeOffset &offset) -> DDateTime |
| auto | to_ddate_time_msg (const builtin_interfaces::msg::Time &builtin_time) -> j2735_v2x_msgs::msg::DDateTime |
| auto | calc_sdsm_time_offset (const builtin_interfaces::msg::Time &external_object_list_time, const builtin_interfaces::msg::Time &external_object_time) -> carma_v2x_msgs::msg::MeasurementTimeOffset |
| auto | to_position_msg (const UtmCoordinate &position_utm) -> geometry_msgs::msg::Point |
| auto | heading_to_enu_yaw (const units::angle::degree_t &heading) -> units::angle::degree_t |
| auto | calc_relative_position (const geometry_msgs::msg::PoseStamped ¤t_pose, const carma_v2x_msgs::msg::PositionOffsetXYZ &detected_object_data) -> carma_v2x_msgs::msg::PositionOffsetXYZ |
| auto | transform_pose_from_map_to_wgs84 (const geometry_msgs::msg::PoseStamped &source_pose, const std::shared_ptr< lanelet::projection::LocalFrameProjector > &map_projection) -> carma_v2x_msgs::msg::Position3D |
| auto | to_detection_list_msg (const carma_v2x_msgs::msg::SensorDataSharingMessage &sdsm, std::string_view georeference, bool is_simulation, const std::optional< SdsmToDetectionListConfig > &conversion_adjustment) -> carma_cooperative_perception_interfaces::msg::DetectionList |
| Converts a carma_v2x_msgs::msg::SensorDataSharingMessage (SDSM) to carma_cooperative_perception_interfaces::msg::DetectionList format. More... | |
| auto | to_detection_msg (const carma_perception_msgs::msg::ExternalObject &object, const MotionModelMapping &motion_model_mapping) -> carma_cooperative_perception_interfaces::msg::Detection |
| auto | to_detection_list_msg (const carma_perception_msgs::msg::ExternalObjectList &object_list, const MotionModelMapping &motion_model_mapping) -> carma_cooperative_perception_interfaces::msg::DetectionList |
| auto | to_external_object_msg (const carma_cooperative_perception_interfaces::msg::Track &track) -> carma_perception_msgs::msg::ExternalObject |
| auto | to_external_object_list_msg (const carma_cooperative_perception_interfaces::msg::TrackList &track_list) -> carma_perception_msgs::msg::ExternalObjectList |
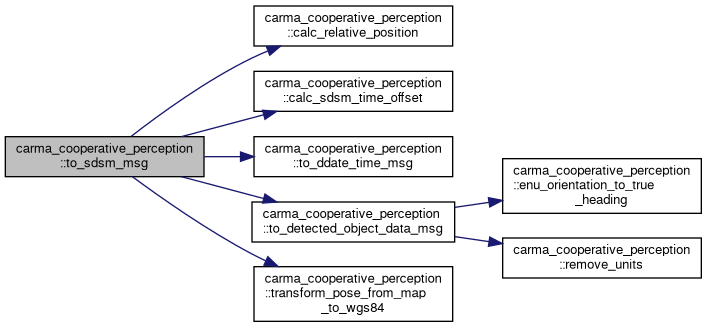
| auto | to_sdsm_msg (const carma_perception_msgs::msg::ExternalObjectList &external_object_list, const geometry_msgs::msg::PoseStamped ¤t_pose, const std::shared_ptr< lanelet::projection::LocalFrameProjector > &map_projection) -> carma_v2x_msgs::msg::SensorDataSharingMessage |
| auto | to_detected_object_data_msg (const carma_perception_msgs::msg::ExternalObject &external_object, const std::shared_ptr< lanelet::projection::LocalFrameProjector > &map_projection) -> carma_v2x_msgs::msg::DetectedObjectData |
| auto | enu_orientation_to_true_heading (double yaw, const lanelet::BasicPoint3d &obj_pose, const std::shared_ptr< lanelet::projection::LocalFrameProjector > &map_projection) -> units::angle::degree_t |
| auto | make_detection (const carma_cooperative_perception_interfaces::msg::Detection &msg) -> Detection |
| template<typename T > | |
| constexpr auto | remove_units (const T &value) |
| constexpr auto | operator== (const UtmZone &lhs, const UtmZone &rhs) -> bool |
| constexpr auto | operator!= (const UtmZone &lhs, const UtmZone &rhs) -> bool |
| auto | to_string (const UtmZone &zone) -> std::string |
| auto | ned_to_enu (const PositionOffsetXYZ &offset_ned) noexcept |
| auto | to_position_msg (const MapCoordinate &position_map) -> geometry_msgs::msg::Point |
| std::string | to_string (const std::vector< std::uint8_t > &temporary_id) |
| void | convert_object_type (carma_cooperative_perception_interfaces::msg::Detection &detection, const j3224_v2x_msgs::msg::ObjectType &j3224_obj_type) |
| void | convert_covariances (carma_cooperative_perception_interfaces::msg::Detection &detection, const carma_v2x_msgs::msg::DetectedObjectCommonData &common_data, const std::optional< SdsmToDetectionListConfig > &conversion_adjustment) |
| auto | make_semantic_class (std::size_t numeric_value) |
| auto | semantic_class_to_numeric_value (mot::SemanticClass semantic_class) |
| auto | make_ctrv_detection (const carma_cooperative_perception_interfaces::msg::Detection &msg) -> Detection |
| auto | make_ctra_detection (const carma_cooperative_perception_interfaces::msg::Detection &msg) -> Detection |
| static auto | to_ros_msg (const mot::CtraTrack &track) |
| static auto | to_ros_msg (const mot::CtrvTrack &track) |
| static auto | to_ros_msg (const Track &track) |
| static auto | temporally_align_detections (std::vector< Detection > &detections, units::time::second_t end_time) -> void |
| static auto | predict_track_states (std::vector< Track > tracks, units::time::second_t end_time) |
Variables | |
| constexpr Month | January {1} |
| constexpr Month | February {2} |
| constexpr Month | March {3} |
| constexpr Month | April {4} |
| constexpr Month | May {5} |
| constexpr Month | June {6} |
| constexpr Month | July {7} |
| constexpr Month | August {8} |
| constexpr Month | September {9} |
| constexpr Month | October {10} |
| constexpr Month | November {11} |
| constexpr Month | December {12} |
Detailed Description
This file contains functions and helper structs to facilitate transforming WGS-84 coordinates to UTM ones.
This file contains a Month class implementation that should be source-compatible with std::chrono::month. Until CARMA targets C++20, we will have to use this instead of the standard library.
Typedef Documentation
◆ Detection
| using carma_cooperative_perception::Detection = typedef std::variant<multiple_object_tracking::CtrvDetection, multiple_object_tracking::CtraDetection> |
Definition at line 34 of file multiple_object_tracker_component.hpp.
◆ Track
| using carma_cooperative_perception::Track = typedef std::variant<multiple_object_tracking::CtrvTrack, multiple_object_tracking::CtraTrack> |
Definition at line 36 of file multiple_object_tracker_component.hpp.
Enumeration Type Documentation
◆ Hemisphere
|
strong |
Function Documentation
◆ calc_detection_time_stamp()
| auto carma_cooperative_perception::calc_detection_time_stamp | ( | DDateTime | d_date_time, |
| const MeasurementTimeOffset & | offset | ||
| ) | -> DDateTime |
Definition at line 170 of file msg_conversion.cpp.
References carma_cooperative_perception::DDateTime::second.
Referenced by to_detection_list_msg().

◆ calc_relative_position()
| auto carma_cooperative_perception::calc_relative_position | ( | const geometry_msgs::msg::PoseStamped & | current_pose, |
| const carma_v2x_msgs::msg::PositionOffsetXYZ & | detected_object_data | ||
| ) | -> carma_v2x_msgs::msg::PositionOffsetXYZ |
Definition at line 305 of file msg_conversion.cpp.
Referenced by to_sdsm_msg().

◆ calc_sdsm_time_offset()
| auto carma_cooperative_perception::calc_sdsm_time_offset | ( | const builtin_interfaces::msg::Time & | external_object_list_time, |
| const builtin_interfaces::msg::Time & | external_object_time | ||
| ) | -> carma_v2x_msgs::msg::MeasurementTimeOffset |
Definition at line 228 of file msg_conversion.cpp.
Referenced by to_sdsm_msg().

◆ calculate_grid_convergence() [1/2]
| auto carma_cooperative_perception::calculate_grid_convergence | ( | const Wgs84Coordinate & | position, |
| const UtmZone & | zone | ||
| ) | -> units::angle::degree_t |
Calculate grid convergence at a given position.
This function calculates the grid convergence at a specific coordinate with respect to a specified UTM zone. Grid convergence is the angle between true north and grid north.
- Parameters
-
[in] position Position represented in WGS-84 coordinates [in] zone The UTM zone
- Returns
- Grid convergence angle
Definition at line 154 of file geodetic.cpp.
References calculate_grid_convergence(), kSouth, and to_string().
Referenced by calculate_grid_convergence(), and to_detection_list_msg().


◆ calculate_grid_convergence() [2/2]
| auto carma_cooperative_perception::calculate_grid_convergence | ( | const Wgs84Coordinate & | position, |
| std::string_view | georeference | ||
| ) | -> units::angle::degree_t |
Definition at line 125 of file geodetic.cpp.
References remove_units().

◆ calculate_utm_zone()
| auto carma_cooperative_perception::calculate_utm_zone | ( | const Wgs84Coordinate & | coordinate | ) | -> UtmZone |
Get the UTM zone number from a WGS-84 coordinate.
Note: This function will not work for coordinates in the special UTM zones Svalbard and Norway.
- Parameters
-
[in] coordinate WGS-84 coordinate
- Returns
- The UTM zone containing the coordinate
Definition at line 27 of file geodetic.cpp.
References carma_cooperative_perception::UtmZone::hemisphere, kNorth, kSouth, carma_cooperative_perception::UtmZone::number, and remove_units().
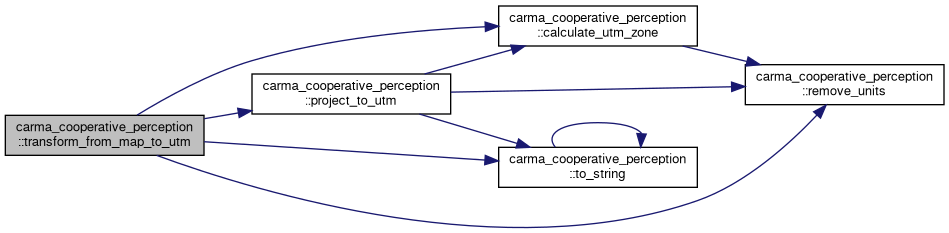
Referenced by project_to_utm(), and transform_from_map_to_utm().


◆ convert_covariances()
| void carma_cooperative_perception::convert_covariances | ( | carma_cooperative_perception_interfaces::msg::Detection & | detection, |
| const carma_v2x_msgs::msg::DetectedObjectCommonData & | common_data, | ||
| const std::optional< SdsmToDetectionListConfig > & | conversion_adjustment | ||
| ) |
Definition at line 382 of file msg_conversion.cpp.
References process_bag::i.
Referenced by to_detection_list_msg().

◆ convert_object_type()
| void carma_cooperative_perception::convert_object_type | ( | carma_cooperative_perception_interfaces::msg::Detection & | detection, |
| const j3224_v2x_msgs::msg::ObjectType & | j3224_obj_type | ||
| ) |
Definition at line 359 of file msg_conversion.cpp.
Referenced by to_detection_list_msg().

◆ enu_orientation_to_true_heading()
| auto carma_cooperative_perception::enu_orientation_to_true_heading | ( | double | yaw, |
| const lanelet::BasicPoint3d & | obj_pose, | ||
| const std::shared_ptr< lanelet::projection::LocalFrameProjector > & | map_projection | ||
| ) | -> units::angle::degree_t |
Definition at line 278 of file msg_conversion.cpp.
Referenced by to_detected_object_data_msg().

◆ euclidean_distance_squared()
| auto carma_cooperative_perception::euclidean_distance_squared | ( | const geometry_msgs::msg::Pose & | a, |
| const geometry_msgs::msg::Pose & | b | ||
| ) | -> double |
Definition at line 189 of file host_vehicle_filter_component.cpp.
Referenced by carma_cooperative_perception::HostVehicleFilterNode::attempt_filter_and_republish().

◆ heading_to_enu_yaw()
| auto carma_cooperative_perception::heading_to_enu_yaw | ( | const units::angle::degree_t & | heading | ) | -> units::angle::degree_t |
Definition at line 273 of file msg_conversion.cpp.
References remove_units().
Referenced by to_detection_list_msg().


◆ make_ctra_detection()
| auto carma_cooperative_perception::make_ctra_detection | ( | const carma_cooperative_perception_interfaces::msg::Detection & | msg | ) | -> Detection |
Definition at line 115 of file multiple_object_tracker_component.cpp.
References make_semantic_class().
Referenced by make_detection().


◆ make_ctrv_detection()
| auto carma_cooperative_perception::make_ctrv_detection | ( | const carma_cooperative_perception_interfaces::msg::Detection & | msg | ) | -> Detection |
Definition at line 77 of file multiple_object_tracker_component.cpp.
References make_semantic_class().
Referenced by make_detection().


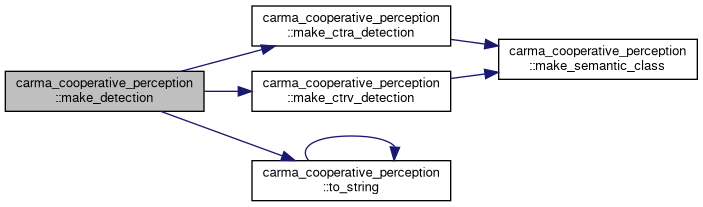
◆ make_detection()
| auto carma_cooperative_perception::make_detection | ( | const carma_cooperative_perception_interfaces::msg::Detection & | msg | ) | -> Detection |
Definition at line 155 of file multiple_object_tracker_component.cpp.
References make_ctra_detection(), make_ctrv_detection(), and to_string().
Referenced by carma_cooperative_perception::MultipleObjectTrackerNode::store_new_detections().

◆ make_semantic_class()
| auto carma_cooperative_perception::make_semantic_class | ( | std::size_t | numeric_value | ) |
Definition at line 41 of file multiple_object_tracker_component.cpp.
Referenced by make_ctra_detection(), and make_ctrv_detection().

◆ ned_to_enu()
|
noexcept |
Definition at line 178 of file msg_conversion.cpp.
Referenced by to_detection_list_msg().

◆ operator!=()
|
inlineconstexpr |
Definition at line 40 of file utm_zone.hpp.
◆ operator+() [1/2]
|
inlineconstexpr |
Addition operator overload.
- Parameters
-
[in] displacement Displacement from coordinate [in] coordinate Position represented in UTM coordinates
- Returns
- A new UtmCoordinate representing the new position
Definition at line 107 of file geodetic.hpp.
◆ operator+() [2/2]
|
inlineconstexpr |
Addition operator overload.
- Parameters
-
[in] coordinate Position represented in UTM coordinates [in] displacement Displacement form coordinate
- Returns
- A new UtmCoordinate representing the new position
Definition at line 93 of file geodetic.hpp.
◆ operator+=()
|
inlineconstexpr |
Addition-assignment operator overload.
- Parameters
-
[in] coordinate Position represented in UTM coordinates [in] displacement Displacement from coordinate
- Returns
- Reference to the coordinate's updated position
Definition at line 75 of file geodetic.hpp.
References carma_cooperative_perception::UtmCoordinate::easting.
◆ operator-() [1/2]
|
inlineconstexpr |
Subtraction operator overload.
- Parameters
-
[in] displacement Displacement from coordinate [in] coordinate Position represented in UTM coordinates
- Returns
- A new UtmCoordinate representing the new position
Definition at line 153 of file geodetic.hpp.
◆ operator-() [2/2]
|
inlineconstexpr |
Subtraction operator overload.
- Parameters
-
[in] coordinate Position represented in UTM coordinates [in] displacement Displacement form coordinate
- Returns
- A new UtmCoordinate representing the new position
Definition at line 139 of file geodetic.hpp.
◆ operator-=()
|
inlineconstexpr |
Subtraction-assignment operator overload.
- Parameters
-
[in] coordinate Position represented in UTM coordinates [in] displacement Displacement from coordinate
- Returns
- Reference to the coordinate's updated position
Definition at line 121 of file geodetic.hpp.
References carma_cooperative_perception::UtmCoordinate::easting.
◆ operator==()
|
inlineconstexpr |
Definition at line 35 of file utm_zone.hpp.
◆ predict_track_states()
|
static |
Definition at line 454 of file multiple_object_tracker_component.cpp.
Referenced by carma_cooperative_perception::MultipleObjectTrackerNode::execute_pipeline().

◆ project_to_carma_map()
| auto carma_cooperative_perception::project_to_carma_map | ( | const Wgs84Coordinate & | coordinate, |
| std::string_view | proj_string | ||
| ) | -> MapCoordinate |
Definition at line 55 of file geodetic.cpp.
References remove_units().
Referenced by to_detection_list_msg().


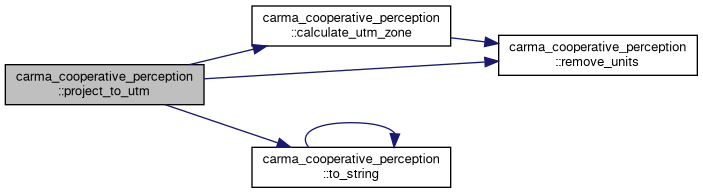
◆ project_to_utm()
| auto carma_cooperative_perception::project_to_utm | ( | const Wgs84Coordinate & | coordinate | ) | -> UtmCoordinate |
Projects a Wgs84Coordinate to its corresponding UTM zone.
- Parameters
-
[in] coordinate Position represented in WGS-84 coordinates
- Returns
- Coordinate's position represented in UTM coordinates
Definition at line 87 of file geodetic.cpp.
References calculate_utm_zone(), kSouth, remove_units(), and to_string().
Referenced by transform_from_map_to_utm().

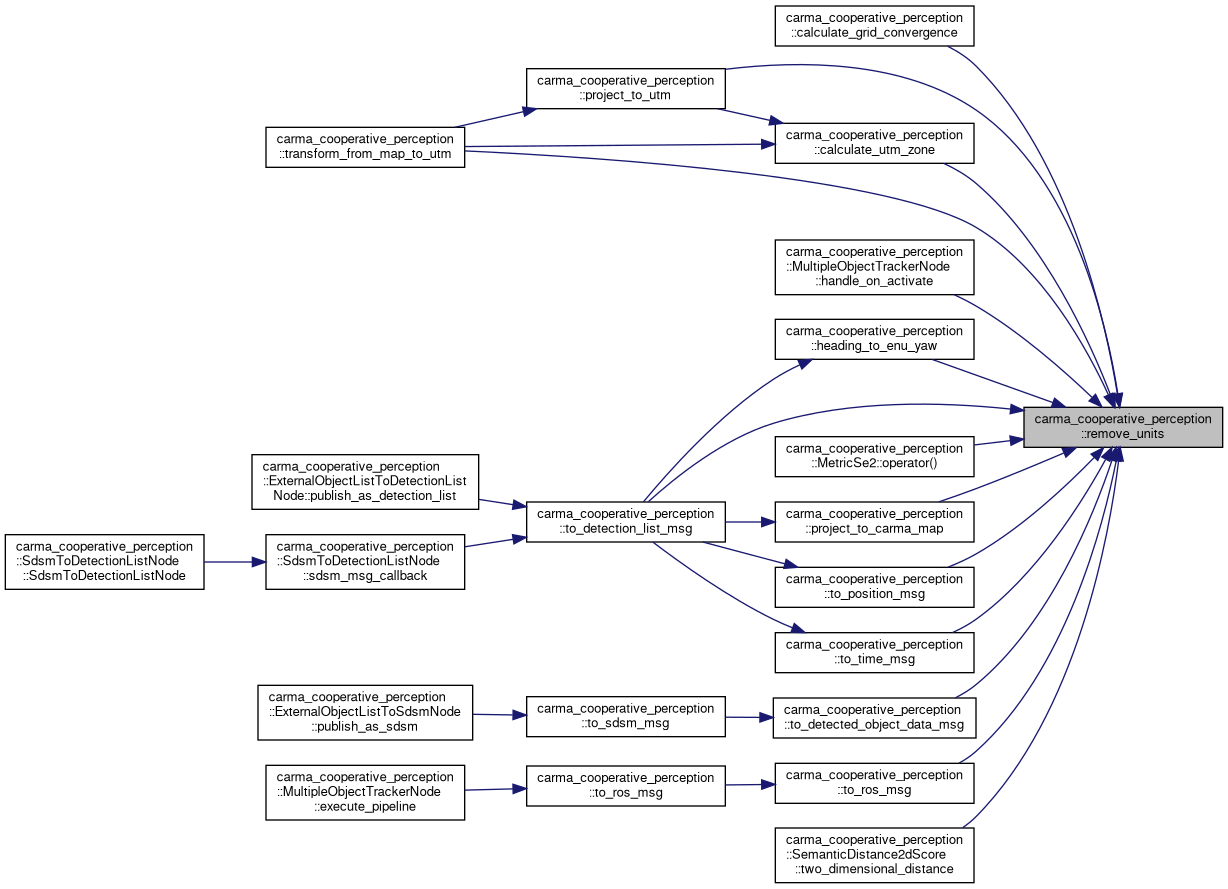
◆ remove_units()
|
constexpr |
Definition at line 25 of file units_extensions.hpp.
Referenced by calculate_grid_convergence(), calculate_utm_zone(), carma_cooperative_perception::MultipleObjectTrackerNode::handle_on_activate(), heading_to_enu_yaw(), carma_cooperative_perception::MetricSe2::operator()(), project_to_carma_map(), project_to_utm(), to_detected_object_data_msg(), to_detection_list_msg(), to_position_msg(), to_ros_msg(), to_time_msg(), transform_from_map_to_utm(), and carma_cooperative_perception::SemanticDistance2dScore::two_dimensional_distance().
◆ semantic_class_to_numeric_value()
| auto carma_cooperative_perception::semantic_class_to_numeric_value | ( | mot::SemanticClass | semantic_class | ) |
Definition at line 59 of file multiple_object_tracker_component.cpp.
Referenced by to_ros_msg().

◆ temporally_align_detections()
|
static |
Definition at line 446 of file multiple_object_tracker_component.cpp.
Referenced by carma_cooperative_perception::MultipleObjectTrackerNode::execute_pipeline().

◆ to_ddate_time_msg()
| auto carma_cooperative_perception::to_ddate_time_msg | ( | const builtin_interfaces::msg::Time & | builtin_time | ) | -> j2735_v2x_msgs::msg::DDateTime |
Definition at line 193 of file msg_conversion.cpp.
Referenced by to_sdsm_msg().

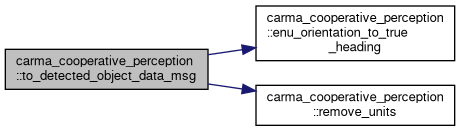
◆ to_detected_object_data_msg()
| auto carma_cooperative_perception::to_detected_object_data_msg | ( | const carma_perception_msgs::msg::ExternalObject & | external_object, |
| const std::shared_ptr< lanelet::projection::LocalFrameProjector > & | map_projection | ||
| ) | -> carma_v2x_msgs::msg::DetectedObjectData |
Definition at line 879 of file msg_conversion.cpp.
References enu_orientation_to_true_heading(), and remove_units().
Referenced by to_sdsm_msg().

◆ to_detection_list_msg() [1/2]
| auto carma_cooperative_perception::to_detection_list_msg | ( | const carma_perception_msgs::msg::ExternalObjectList & | object_list, |
| const MotionModelMapping & | motion_model_mapping | ||
| ) | -> carma_cooperative_perception_interfaces::msg::DetectionList |
Definition at line 738 of file msg_conversion.cpp.
◆ to_detection_list_msg() [2/2]
| auto carma_cooperative_perception::to_detection_list_msg | ( | const carma_v2x_msgs::msg::SensorDataSharingMessage & | sdsm, |
| std::string_view | georeference, | ||
| bool | is_simulation, | ||
| const std::optional< SdsmToDetectionListConfig > & | conversion_adjustment | ||
| ) | -> carma_cooperative_perception_interfaces::msg::DetectionList |
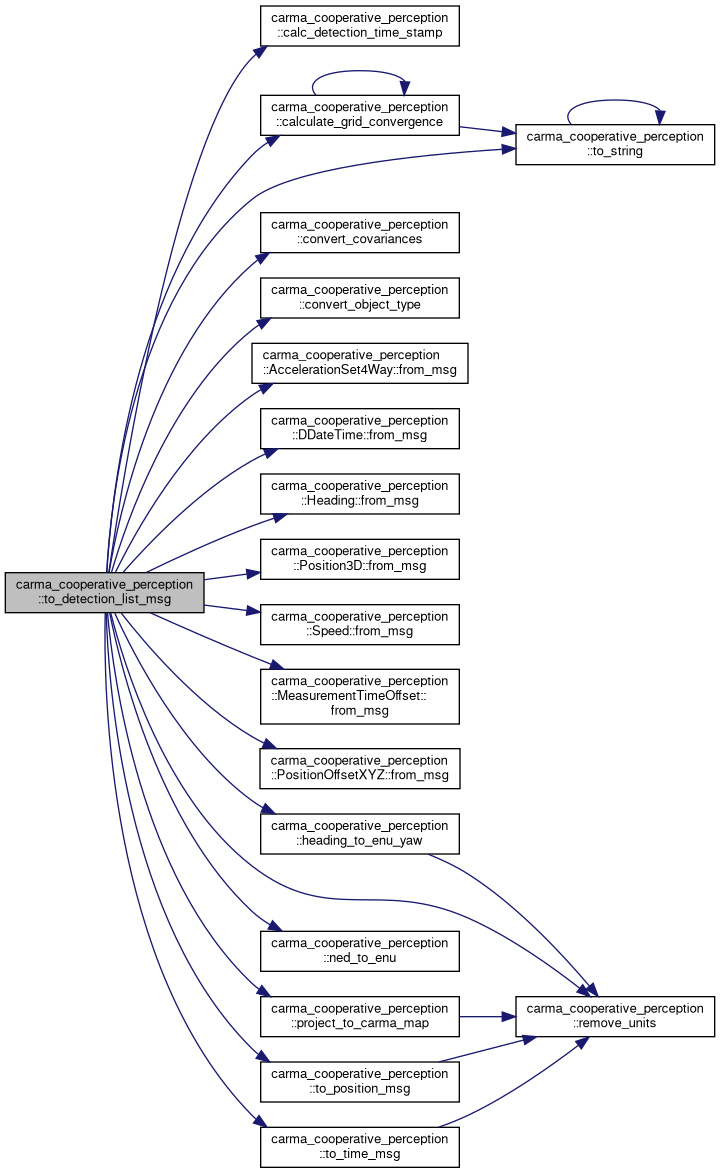
Converts a carma_v2x_msgs::msg::SensorDataSharingMessage (SDSM) to carma_cooperative_perception_interfaces::msg::DetectionList format.
This function transforms data from the V2X SDSM format into the CARMA cooperative perception DetectionList format, handling the necessary coordinate transformations.
Important coordinate system transformations:
- SDSM uses NED (North-East-Down) coordinate system for position offsets
- SDSM heading is measured clockwise from true north (0° at north, 90° at east)
- Output DetectionList uses ENU (East-North-Up) coordinate system
- Output heading is converted to ENU yaw (0° at east, 90° at north)
The function performs the following key operations:
- Projects reference position from WGS84 to the local map frame
- Converts NED position offsets to ENU
- Handles heading conversion from true north to map grid
- Transforms detection confidence values to covariance values
- Maps object types to appropriate semantic classes
- Parameters
-
sdsm The input J3224 SDSM message containing detected objects georeference String containing the georeference information for coordinate projection is_simulation Boolean flag indicating if running in simulation mode (affects timestamps) conversion_adjustment Optional configuration for position and covariance adjustments
- Returns
- carma_cooperative_perception_interfaces::msg::DetectionList message containing the transformed detections in CARMA Platform format
Definition at line 566 of file msg_conversion.cpp.
References calc_detection_time_stamp(), calculate_grid_convergence(), convert_covariances(), convert_object_type(), carma_cooperative_perception::MapCoordinate::easting, carma_cooperative_perception::AccelerationSet4Way::from_msg(), carma_cooperative_perception::DDateTime::from_msg(), carma_cooperative_perception::Heading::from_msg(), carma_cooperative_perception::Position3D::from_msg(), carma_cooperative_perception::Speed::from_msg(), carma_cooperative_perception::MeasurementTimeOffset::from_msg(), carma_cooperative_perception::PositionOffsetXYZ::from_msg(), heading_to_enu_yaw(), carma_cooperative_perception::Wgs84Coordinate::latitude, ned_to_enu(), project_to_carma_map(), remove_units(), to_position_msg(), to_string(), and to_time_msg().
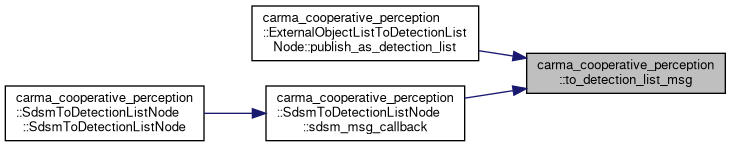
Referenced by carma_cooperative_perception::ExternalObjectListToDetectionListNode::publish_as_detection_list(), and carma_cooperative_perception::SdsmToDetectionListNode::sdsm_msg_callback().
◆ to_detection_msg()
| auto carma_cooperative_perception::to_detection_msg | ( | const carma_perception_msgs::msg::ExternalObject & | object, |
| const MotionModelMapping & | motion_model_mapping | ||
| ) | -> carma_cooperative_perception_interfaces::msg::Detection |
Definition at line 682 of file msg_conversion.cpp.
References process_bag::i, and to_string().

◆ to_external_object_list_msg()
| auto carma_cooperative_perception::to_external_object_list_msg | ( | const carma_cooperative_perception_interfaces::msg::TrackList & | track_list | ) | -> carma_perception_msgs::msg::ExternalObjectList |
Definition at line 826 of file msg_conversion.cpp.
References to_external_object_msg().
Referenced by carma_cooperative_perception::TrackListToExternalObjectListNode::publish_as_external_object_list().


◆ to_external_object_msg()
| auto carma_cooperative_perception::to_external_object_msg | ( | const carma_cooperative_perception_interfaces::msg::Track & | track | ) | -> carma_perception_msgs::msg::ExternalObject |
Definition at line 755 of file msg_conversion.cpp.
Referenced by to_external_object_list_msg().

◆ to_position_msg() [1/2]
| auto carma_cooperative_perception::to_position_msg | ( | const MapCoordinate & | position_map | ) | -> geometry_msgs::msg::Point |
Definition at line 262 of file msg_conversion.cpp.
References remove_units().

◆ to_position_msg() [2/2]
| auto carma_cooperative_perception::to_position_msg | ( | const UtmCoordinate & | position_utm | ) | -> geometry_msgs::msg::Point |
Definition at line 251 of file msg_conversion.cpp.
References remove_units().
Referenced by to_detection_list_msg().


◆ to_ros_msg() [1/3]
|
static |
Definition at line 172 of file multiple_object_tracker_component.cpp.
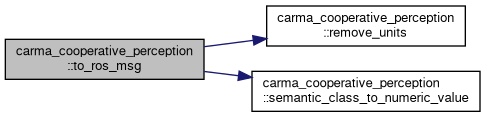
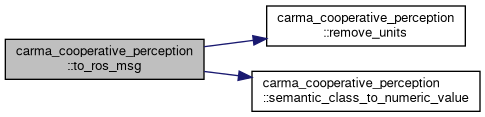
References remove_units(), and semantic_class_to_numeric_value().
Referenced by to_ros_msg().

◆ to_ros_msg() [2/3]
|
static |
Definition at line 203 of file multiple_object_tracker_component.cpp.
References remove_units(), and semantic_class_to_numeric_value().
◆ to_ros_msg() [3/3]
|
static |
Definition at line 232 of file multiple_object_tracker_component.cpp.
References to_ros_msg().
Referenced by carma_cooperative_perception::MultipleObjectTrackerNode::execute_pipeline().


◆ to_sdsm_msg()
| auto carma_cooperative_perception::to_sdsm_msg | ( | const carma_perception_msgs::msg::ExternalObjectList & | external_object_list, |
| const geometry_msgs::msg::PoseStamped & | current_pose, | ||
| const std::shared_ptr< lanelet::projection::LocalFrameProjector > & | map_projection | ||
| ) | -> carma_v2x_msgs::msg::SensorDataSharingMessage |
Definition at line 839 of file msg_conversion.cpp.
References calc_relative_position(), calc_sdsm_time_offset(), to_ddate_time_msg(), to_detected_object_data_msg(), and transform_pose_from_map_to_wgs84().
Referenced by carma_cooperative_perception::ExternalObjectListToSdsmNode::publish_as_sdsm().

◆ to_string() [1/2]
| std::string carma_cooperative_perception::to_string | ( | const std::vector< std::uint8_t > & | temporary_id | ) |
Definition at line 344 of file msg_conversion.cpp.
References create_two_lane_map::str.
Referenced by to_detection_msg().

◆ to_string() [2/2]
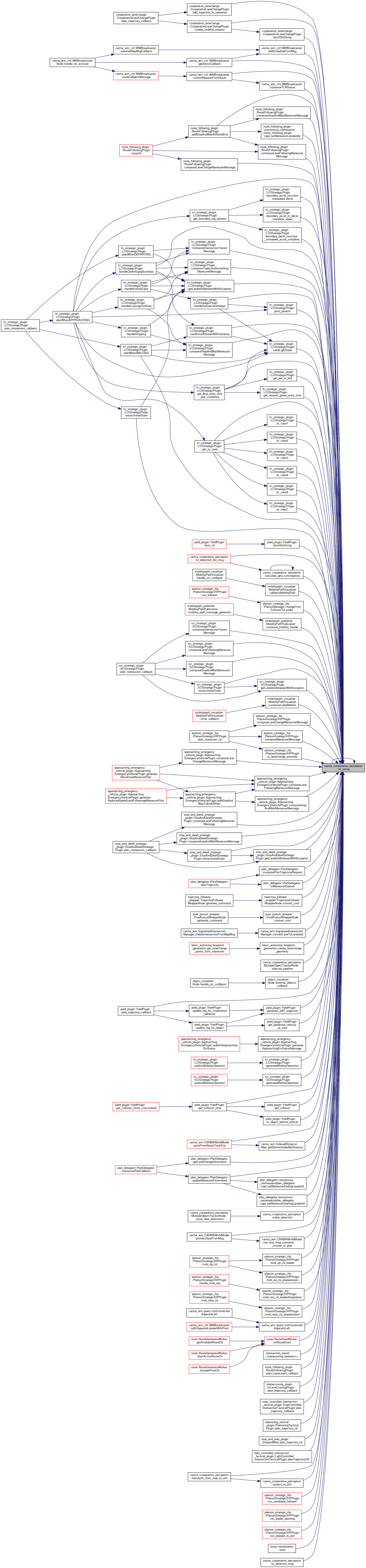
| auto carma_cooperative_perception::to_string | ( | const UtmZone & | zone | ) | -> std::string |
Definition at line 21 of file utm_zone.cpp.
References kNorth, and to_string().
Referenced by cooperative_lanechange::CooperativeLaneChangePlugin::add_trajectory_to_response(), carma_wm_ctrl::WMBroadcaster::addScheduleFromMsg(), route_following_plugin::RouteFollowingPlugin::addStopAndWaitAtRouteEnd(), lci_strategic_plugin::LCIStrategicPlugin::boundary_accel_nocruise_maxspeed_decel(), lci_strategic_plugin::LCIStrategicPlugin::boundary_accel_or_decel_complete_upper(), lci_strategic_plugin::LCIStrategicPlugin::boundary_decel_nocruise_minspeed_accel_complete(), cooperative_lanechange::CooperativeLaneChangePlugin::bsmIDtoString(), yield_plugin::YieldPlugin::bsmIDtoString(), calculate_grid_convergence(), mobilitypath_visualizer::MobilityPathVisualizer::callbackMobilityPath(), lci_strategic_plugin::LCIStrategicPlugin::canArriveAtGreenWithCertainty(), platooning_strategic_ihp::PlatooningManager::changeFromFollowerToLeader(), mobilitypath_publisher::MobilityPathPublication::compose_mobility_header(), lci_strategic_plugin::LCIStrategicPlugin::composeIntersectionTransitMessage(), sci_strategic_plugin::SCIStrategicPlugin::composeIntersectionTransitMessage(), mobilitypath_visualizer::MobilityPathVisualizer::composeLabelMarker(), platooning_strategic_ihp::PlatooningStrategicIHPPlugin::composeLaneChangeManeuverMessage(), route_following_plugin::RouteFollowingPlugin::composeLaneChangeManeuverMessage(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::composeLaneChangeManeuverMessage(), route_following_plugin::RouteFollowingPlugin::composeLaneFollowingManeuverMessage(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::composeLaneFollowingManeuverMessage(), stop_and_dwell_strategic_plugin::StopAndDwellStrategicPlugin::composeLaneFollowingManeuverMessage(), sci_strategic_plugin::SCIStrategicPlugin::composeLaneFollowingManeuverMessage(), platooning_strategic_ihp::PlatooningStrategicIHPPlugin::composeManeuverMessage(), plan_delegator::PlanDelegator::composePlanTrajectoryRequest(), sci_strategic_plugin::SCIStrategicPlugin::composeStopAndWaitManeuverMessage(), stop_and_dwell_strategic_plugin::StopAndDwellStrategicPlugin::composeStopAndWaitManeuverMessage(), lci_strategic_plugin::LCIStrategicPlugin::composeStopAndWaitManeuverMessage(), route_following_plugin::RouteFollowingPlugin::composeStopAndWaitManeuverMessage(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::composeStopAndWaitManeuverMessage(), carma_wm_ctrl::WMBroadcaster::composeTCRStatus(), lci_strategic_plugin::LCIStrategicPlugin::composeTrajectorySmoothingManeuverMessage(), carma_wm_ctrl::WMBroadcaster::controlRequestFromRoute(), trajectory_follower_wrapper::TrajectoryFollowerWrapperNode::convert_cmd(), pure_pursuit_wrapper::PurePursuitWrapperNode::convert_cmd(), carma_wm::SignalizedIntersectionManager::convertLaneToLaneletId(), basic_autonomy::waypoint_generation::create_lanechange_geometry(), cooperative_lanechange::CooperativeLaneChangePlugin::create_mobility_request(), carma_wm::SignalizedIntersectionManager::createIntersectionFromMapMsg(), carma_cooperative_perception::MultipleObjectTrackerNode::execute_pipeline(), object_visualizer::Node::external_objects_callback(), carma_wm::SignalizedIntersectionManager::extract_signal_states_from_movement_state(), lci_strategic_plugin::LCIStrategicPlugin::extractInitialState(), sci_strategic_plugin::SCIStrategicPlugin::extractInitialState(), stop_and_dwell_strategic_plugin::StopAndDwellStrategicPlugin::extractInitialState(), arbitrator::TreePlanner::generate_plan(), approaching_emergency_vehicle_plugin::ApproachingEmergencyVehiclePlugin::generateApproachingErvStatusMessage(), lci_strategic_plugin::LCIStrategicPlugin::generateMobilityOperation(), sci_strategic_plugin::SCIStrategicPlugin::generateMobilityOperation(), light_controlled_intersection_tactical_plugin::LightControlledIntersectionTacticalPlugin::generateNewTrajectory(), carma_wm_ctrl::WMBroadcaster::geofenceCallback(), yield_plugin::YieldPlugin::get_collision(), yield_plugin::YieldPlugin::get_collision_time(), yield_plugin::YieldPlugin::get_collision_times_concurrently_cuda(), lci_strategic_plugin::LCIStrategicPlugin::get_eet_or_tbd(), lci_strategic_plugin::LCIStrategicPlugin::get_final_entry_time_and_conditions(), lci_strategic_plugin::LCIStrategicPlugin::get_nearest_green_entry_time(), yield_plugin::YieldPlugin::get_predicted_velocity_at_time(), lci_strategic_plugin::LCIStrategicPlugin::get_ts_case(), carma_wm::IndexedDistanceMap::getElementIndexByDistance(), plan_delegator::PlanDelegator::getLaneChangeInformation(), lci_strategic_plugin::LCIStrategicPlugin::getLaneletsBetweenWithException(), sci_strategic_plugin::SCIStrategicPlugin::getLaneletsBetweenWithException(), stop_and_dwell_strategic_plugin::StopAndDwellStrategicPlugin::getLaneletsBetweenWithException(), carma_wm::SignalizedIntersectionManager::getTrafficSignal(), carma_wm::SignalizedIntersectionManager::getTrafficSignalId(), lci_strategic_plugin::LCIStrategicPlugin::handleFailureCaseHelper(), lci_strategic_plugin::LCIStrategicPlugin::handleGreenSignalScenario(), platooning_strategic_ihp::PlatooningStrategicIHPPlugin::is_lanechange_possible(), yield_plugin::YieldPlugin::is_object_behind_vehicle(), basic_autonomy::waypoint_generation::is_valid_yield_plan(), plan_delegator::PlanDelegator::isManeuverExpired(), light_controlled_intersection_tactical_plugin::LightControlledIntersectionTacticalPlugin::logDebugInfoAboutPreviousTrajectory(), make_detection(), carma_wm::SignalizedIntersectionManager::min_end_time_converter_minute_of_year(), platooning_strategic_ihp::PlatooningStrategicIHPPlugin::mob_op_cb_leader(), platooning_strategic_ihp::PlatooningStrategicIHPPlugin::mob_op_cb_preparetojoin(), platooning_strategic_ihp::PlatooningStrategicIHPPlugin::mob_req_cb_leadwithoperation(), platooning_strategic_ihp::PlatooningStrategicIHPPlugin::mob_resp_cb_preparetojoin(), carma_wm::query::nonConnectedAdjacentLeft(), route::RouteStateWorker::onRouteEvent(), plan_delegator::PlanDelegator::onTrajPlanTick(), intersection_transit_maneuvering::operator<<(), route_following_plugin::RouteFollowingPlugin::plan_maneuvers_callback(), inlanecruising_plugin::InLaneCruisingPlugin::plan_trajectory_callback(), yield_plugin::YieldPlugin::plan_trajectory_callback(), stop_controlled_intersection_tactical_plugin::StopControlledIntersectionTacticalPlugin::plan_trajectory_callback(), platooning_tactical_plugin::PlatooningTacticalPlugin::plan_trajectory_cb(), stop_and_wait_plugin::StopandWait::plan_trajectory_cb(), light_controlled_intersection_tactical_plugin::LightControlledIntersectionTacticalPlugin::planTrajectorySmoothing(), lci_strategic_plugin::LCIStrategicPlugin::planWhenAPPROACHING(), lci_strategic_plugin::LCIStrategicPlugin::planWhenWAITING(), carma_wm::CARMAWorldModel::pointFromRouteTrackPos(), lci_strategic_plugin::LCIStrategicPlugin::print_params(), project_to_utm(), platooning_strategic_ihp::PlatooningStrategicIHPPlugin::run_candidate_follower(), platooning_strategic_ihp::PlatooningStrategicIHPPlugin::run_leader_aborting(), platooning_strategic_ihp::PlatooningStrategicIHPPlugin::run_prepare_to_join(), boost::serialization::save(), plan_delegator::anonymous_namespace{plan_delegator.cpp}::setManeuverEndingLaneletId(), route_following_plugin::anonymous_namespace{route_following_plugin.cpp}::setManeuverLaneletIds(), plan_delegator::anonymous_namespace{plan_delegator.cpp}::setManeuverStartingLaneletId(), carma_wm_ctrl::GeofenceScheduler::startGeofenceCallback(), to_detection_list_msg(), to_string(), transform_from_map_to_utm(), lci_strategic_plugin::LCIStrategicPlugin::ts_case1(), lci_strategic_plugin::LCIStrategicPlugin::ts_case2(), lci_strategic_plugin::LCIStrategicPlugin::ts_case3(), lci_strategic_plugin::LCIStrategicPlugin::ts_case4(), lci_strategic_plugin::LCIStrategicPlugin::ts_case6(), lci_strategic_plugin::LCIStrategicPlugin::ts_case7(), plan_delegator::PlanDelegator::updateManeuverParameters(), lci_strategic_plugin::LCIStrategicPlugin::validLightState(), and carma_cloud_client::CarmaCloudClient::XMLconversion().
◆ to_time_msg()
| auto carma_cooperative_perception::to_time_msg | ( | const DDateTime & | d_date_time, |
| bool | is_simulation | ||
| ) | -> builtin_interfaces::msg::Time |
Definition at line 61 of file msg_conversion.cpp.
References remove_units().
Referenced by to_detection_list_msg().


◆ transform_from_map_to_utm()
| auto carma_cooperative_perception::transform_from_map_to_utm | ( | carma_cooperative_perception_interfaces::msg::DetectionList | detection_list, |
| const std::string & | map_origin | ||
| ) | -> carma_cooperative_perception_interfaces::msg::DetectionList |
Definition at line 27 of file external_object_list_to_detection_list_component.cpp.
References calculate_utm_zone(), project_to_utm(), remove_units(), and to_string().
◆ transform_pose_from_map_to_wgs84()
| auto carma_cooperative_perception::transform_pose_from_map_to_wgs84 | ( | const geometry_msgs::msg::PoseStamped & | source_pose, |
| const std::shared_ptr< lanelet::projection::LocalFrameProjector > & | map_projection | ||
| ) | -> carma_v2x_msgs::msg::Position3D |
Definition at line 323 of file msg_conversion.cpp.
Referenced by to_sdsm_msg().

Variable Documentation
◆ April
|
inlineconstexpr |
◆ August
|
inlineconstexpr |
◆ December
|
inlineconstexpr |
◆ February
|
inlineconstexpr |
◆ January
|
inlineconstexpr |
◆ July
|
inlineconstexpr |
◆ June
|
inlineconstexpr |
◆ March
|
inlineconstexpr |
◆ May
|
inlineconstexpr |
◆ November
|
inlineconstexpr |
◆ October
|
inlineconstexpr |