#include <sdsm_to_detection_list_component.hpp>
Public Member Functions | |
| auto | handle_on_configure (const rclcpp_lifecycle::State &) -> carma_ros2_utils::CallbackReturn override |
| SdsmToDetectionListNode (const rclcpp::NodeOptions &options) | |
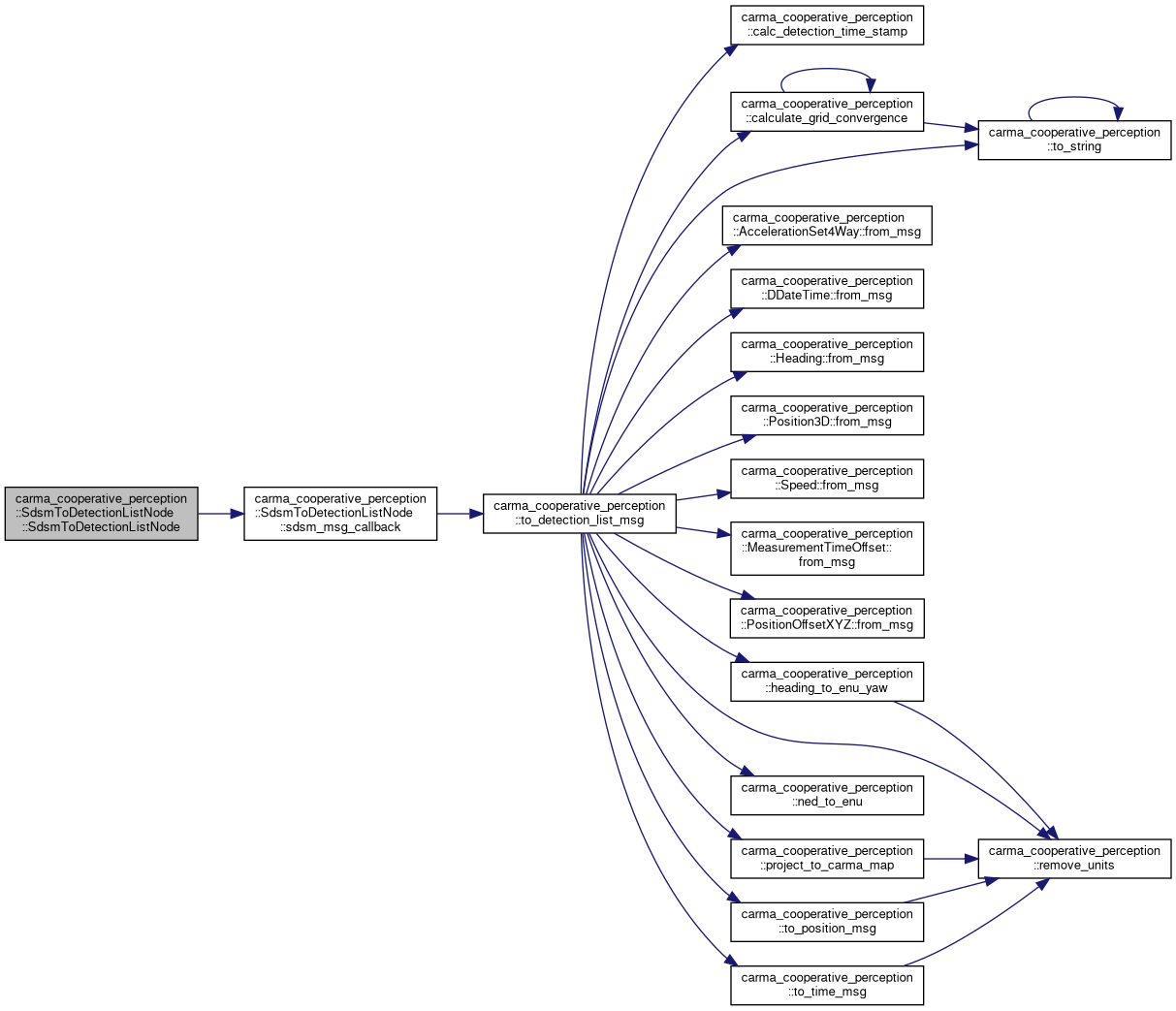
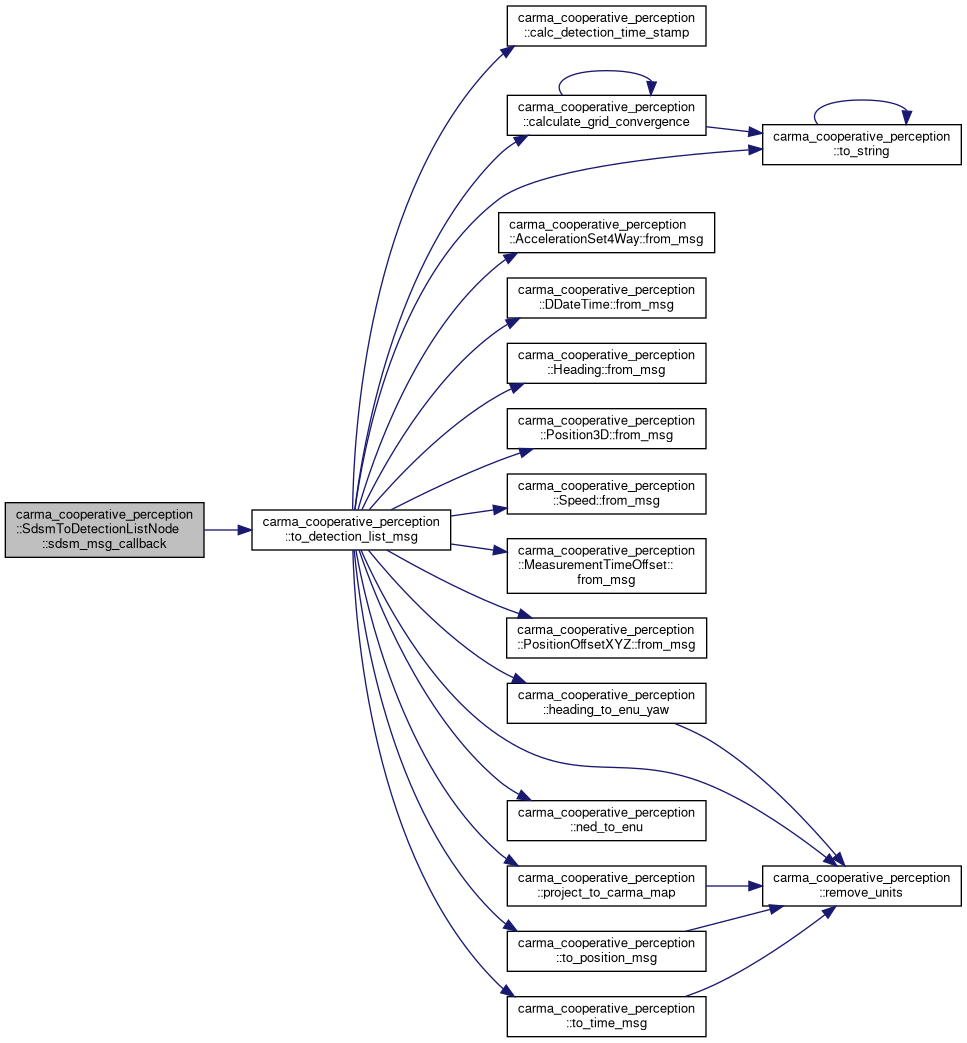
| auto | sdsm_msg_callback (const input_msg_type &msg) const -> void |
Private Types | |
| using | input_msg_type = carma_v2x_msgs::msg::SensorDataSharingMessage |
| using | input_msg_shared_pointer = typename input_msg_type::SharedPtr |
| using | output_msg_type = carma_cooperative_perception_interfaces::msg::DetectionList |
Private Member Functions | |
| rcl_interfaces::msg::SetParametersResult | update_parameters (const std::vector< rclcpp::Parameter > ¶meters) |
| void | update_config_double_parameter (const rclcpp::Parameter ¶meter) |
Private Attributes | |
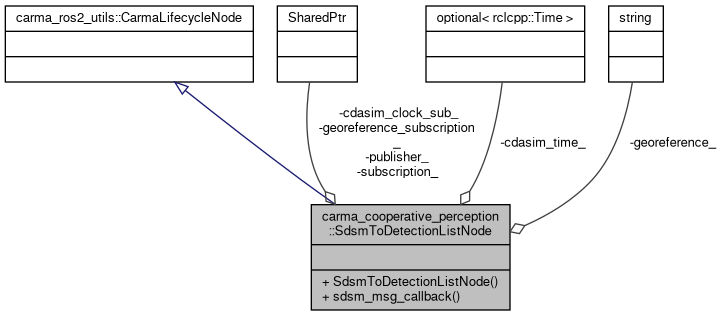
| rclcpp::Publisher< output_msg_type >::SharedPtr | publisher_ |
| rclcpp::Subscription< input_msg_type >::SharedPtr | subscription_ |
| rclcpp::Subscription< std_msgs::msg::String >::SharedPtr | georeference_subscription_ |
| rclcpp::Subscription< rosgraph_msgs::msg::Clock >::SharedPtr | cdasim_clock_sub_ |
| std::optional< rclcpp::Time > | cdasim_time_ {std::nullopt} |
| std::string | georeference_ {""} |
| SdsmToDetectionListConfig | config_ {} |
| OnSetParametersCallbackHandle::SharedPtr | on_set_parameters_callback_ {nullptr} |
| std::unordered_set< std::string > | valid_parameter_names_ |
Detailed Description
Definition at line 32 of file sdsm_to_detection_list_component.hpp.
Member Typedef Documentation
◆ input_msg_shared_pointer
|
private |
Definition at line 35 of file sdsm_to_detection_list_component.hpp.
◆ input_msg_type
|
private |
Definition at line 34 of file sdsm_to_detection_list_component.hpp.
◆ output_msg_type
|
private |
Definition at line 36 of file sdsm_to_detection_list_component.hpp.
Constructor & Destructor Documentation
◆ SdsmToDetectionListNode()
|
inlineexplicit |
Definition at line 81 of file sdsm_to_detection_list_component.hpp.
References sdsm_msg_callback().
Member Function Documentation
◆ handle_on_configure()
|
inlineoverride |
Definition at line 39 of file sdsm_to_detection_list_component.hpp.
References carma_cooperative_perception::SdsmToDetectionListConfig::adjust_pose, config_, on_set_parameters_callback_, carma_cooperative_perception::SdsmToDetectionListConfig::overwrite_covariance, carma_cooperative_perception::SdsmToDetectionListConfig::pose_covariance_x, carma_cooperative_perception::SdsmToDetectionListConfig::pose_covariance_y, carma_cooperative_perception::SdsmToDetectionListConfig::pose_covariance_yaw, carma_cooperative_perception::SdsmToDetectionListConfig::pose_covariance_z, carma_cooperative_perception::SdsmToDetectionListConfig::twist_covariance_x, carma_cooperative_perception::SdsmToDetectionListConfig::twist_covariance_yaw, carma_cooperative_perception::SdsmToDetectionListConfig::twist_covariance_z, update_parameters(), carma_cooperative_perception::SdsmToDetectionListConfig::x_offset, carma_cooperative_perception::SdsmToDetectionListConfig::y_offset, and carma_cooperative_perception::SdsmToDetectionListConfig::yaw_offset.

◆ sdsm_msg_callback()
|
inline |
Definition at line 110 of file sdsm_to_detection_list_component.hpp.
References carma_cooperative_perception::to_detection_list_msg().
Referenced by SdsmToDetectionListNode().

◆ update_config_double_parameter()
|
inlineprivate |
Definition at line 206 of file sdsm_to_detection_list_component.hpp.
◆ update_parameters()
|
inlineprivate |
Definition at line 160 of file sdsm_to_detection_list_component.hpp.
Referenced by handle_on_configure().

Member Data Documentation
◆ cdasim_clock_sub_
|
private |
Definition at line 149 of file sdsm_to_detection_list_component.hpp.
◆ cdasim_time_
|
private |
Definition at line 150 of file sdsm_to_detection_list_component.hpp.
◆ config_
|
private |
Definition at line 155 of file sdsm_to_detection_list_component.hpp.
Referenced by handle_on_configure().
◆ georeference_
|
private |
Definition at line 152 of file sdsm_to_detection_list_component.hpp.
◆ georeference_subscription_
|
private |
Definition at line 147 of file sdsm_to_detection_list_component.hpp.
◆ on_set_parameters_callback_
|
private |
Definition at line 157 of file sdsm_to_detection_list_component.hpp.
Referenced by handle_on_configure().
◆ publisher_
|
private |
Definition at line 145 of file sdsm_to_detection_list_component.hpp.
◆ subscription_
|
private |
Definition at line 146 of file sdsm_to_detection_list_component.hpp.
◆ valid_parameter_names_
|
private |
Definition at line 234 of file sdsm_to_detection_list_component.hpp.
The documentation for this class was generated from the following file:
- carma_cooperative_perception/include/carma_cooperative_perception/sdsm_to_detection_list_component.hpp