carma_cooperative_perception::UtmCoordinate Struct Reference
Represents a position using UTM coordinates. More...
#include <geodetic.hpp>
Collaboration diagram for carma_cooperative_perception::UtmCoordinate:
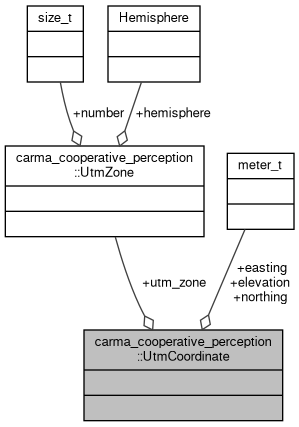
Public Attributes | |
| UtmZone | utm_zone |
| units::length::meter_t | easting |
| units::length::meter_t | northing |
| units::length::meter_t | elevation |
Detailed Description
Represents a position using UTM coordinates.
Definition at line 49 of file geodetic.hpp.
Member Data Documentation
◆ easting
| units::length::meter_t carma_cooperative_perception::UtmCoordinate::easting |
Definition at line 52 of file geodetic.hpp.
Referenced by carma_cooperative_perception::operator+=(), and carma_cooperative_perception::operator-=().
◆ elevation
| units::length::meter_t carma_cooperative_perception::UtmCoordinate::elevation |
Definition at line 54 of file geodetic.hpp.
◆ northing
| units::length::meter_t carma_cooperative_perception::UtmCoordinate::northing |
Definition at line 53 of file geodetic.hpp.
◆ utm_zone
| UtmZone carma_cooperative_perception::UtmCoordinate::utm_zone |
Definition at line 51 of file geodetic.hpp.
The documentation for this struct was generated from the following file:
- carma_cooperative_perception/include/carma_cooperative_perception/geodetic.hpp