Functions | |
| std::vector< lanelet::ConstLanelet > | getLaneletsFromPoint (const lanelet::LaneletMapConstPtr &semantic_map, const lanelet::BasicPoint2d &point, const unsigned int n=10) |
| carma_wm::query namespace contains implementations for query functions (input and output read or write-able) for stand-alone lanelet map without rest of the CARMAWorldModel features. Currently mainly WMBroadcaster (carma_wm_ctrl) is using this to manipulate its own map without creating instance of carma_wm More... | |
| std::vector< lanelet::Lanelet > | getLaneletsFromPoint (const lanelet::LaneletMapPtr &semantic_map, const lanelet::BasicPoint2d &point, const unsigned int n=10) |
| (non-const version) Gets the underlying lanelet, given the cartesian point on the map More... | |
| std::vector< lanelet::ConstLanelet > | nonConnectedAdjacentLeft (const lanelet::LaneletMapConstPtr &semantic_map, const lanelet::BasicPoint2d &input_point, const unsigned int n=10) |
| Given the cartesian point on the map, tries to get the opposite direction lanelet on the left This function is intended to find "adjacentLeft lanelets" that doesn't share points between lanelets where adjacentLeft of lanelet library fails. More... | |
| std::vector< lanelet::Lanelet > | nonConnectedAdjacentLeft (const lanelet::LaneletMapPtr &semantic_map, const lanelet::BasicPoint2d &input_point, const unsigned int n=10) |
| (non-const version) Given the cartesian point on the map, tries to get the opposite direction lanelet on the left This function is intended to find "adjacentLeft lanelets" that doesn't share points between lanelets where adjacentLeft of lanelet library fails More... | |
| lanelet::ConstLaneletOrAreas | getAffectedLaneletOrAreas (const lanelet::Points3d &gf_pts, const lanelet::LaneletMapPtr &lanelet_map, std::shared_ptr< const lanelet::routing::RoutingGraph > routing_graph, double max_lane_width) |
| Gets the affected lanelet or areas based on the points in the given map's frame. More... | |
| std::unordered_set< lanelet::Lanelet > | filterSuccessorLanelets (const std::unordered_set< lanelet::Lanelet > &possible_lanelets, const std::unordered_set< lanelet::Lanelet > &root_lanelets, const lanelet::LaneletMapPtr &lanelet_map, std::shared_ptr< const lanelet::routing::RoutingGraph > routing_graph) |
| A function that filters successor lanelets of root_lanelets from possible_lanelets. More... | |
Function Documentation
◆ filterSuccessorLanelets()
| std::unordered_set< lanelet::Lanelet > carma_wm::query::filterSuccessorLanelets | ( | const std::unordered_set< lanelet::Lanelet > & | possible_lanelets, |
| const std::unordered_set< lanelet::Lanelet > & | root_lanelets, | ||
| const lanelet::LaneletMapPtr & | lanelet_map, | ||
| std::shared_ptr< const lanelet::routing::RoutingGraph > | routing_graph | ||
| ) |
A function that filters successor lanelets of root_lanelets from possible_lanelets.
- Parameters
-
possible_lanelets all possible lanelets to check root_lanelets lanelets to filter from lanelet_map Lanelet Map Ptr routing_graph Routing graph of the lanelet map
NOTE:Mainly used as a helper function for getAffectedLaneletOrAreas
Definition at line 270 of file WorldModelUtils.cpp.
Referenced by getAffectedLaneletOrAreas().

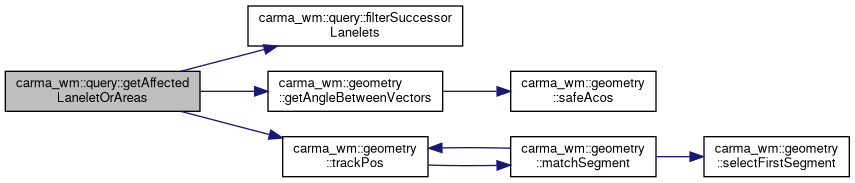
◆ getAffectedLaneletOrAreas()
| lanelet::ConstLaneletOrAreas carma_wm::query::getAffectedLaneletOrAreas | ( | const lanelet::Points3d & | gf_pts, |
| const lanelet::LaneletMapPtr & | lanelet_map, | ||
| std::shared_ptr< const lanelet::routing::RoutingGraph > | routing_graph, | ||
| double | max_lane_width | ||
| ) |
Gets the affected lanelet or areas based on the points in the given map's frame.
- Parameters
-
geofence_msg lanelet::Points3d in local frame lanelet_map Lanelet Map Ptr routing_graph Routing graph of the lanelet map max_lane_width max lane width of the lanes in the map
NOTE:Currently this function only checks lanelets and will be expanded to areas in the future.
Definition at line 117 of file WorldModelUtils.cpp.
References carma_wm::TrackPos::downtrack, filterSuccessorLanelets(), carma_wm::geometry::getAngleBetweenVectors(), carma_wm::geometry::trackPos(), osm_transform::x, and osm_transform::y.
Referenced by carma_wm::SignalizedIntersectionManager::convertLaneToLaneletId(), and carma_wm_ctrl::WMBroadcaster::getAffectedLaneletOrAreas().

◆ getLaneletsFromPoint() [1/2]
| std::vector< lanelet::ConstLanelet > carma_wm::query::getLaneletsFromPoint | ( | const lanelet::LaneletMapConstPtr & | semantic_map, |
| const lanelet::BasicPoint2d & | point, | ||
| const unsigned int | n = 10 |
||
| ) |
carma_wm::query namespace contains implementations for query functions (input and output read or write-able) for stand-alone lanelet map without rest of the CARMAWorldModel features. Currently mainly WMBroadcaster (carma_wm_ctrl) is using this to manipulate its own map without creating instance of carma_wm
Gets the underlying lanelet, given the cartesian point on the map
- Parameters
-
semantic_map Lanelet Map Ptr point Cartesian point to check the corressponding lanelet n Number of lanelets to return. Default is 10. As there could be many lanelets overlapping.
- Exceptions
-
std::invalid_argument if the map is not set, contains no lanelets
- Returns
- vector of underlying lanelet, empty vector if it is not part of any lanelet
Definition at line 24 of file WorldModelUtils.cpp.
References process_traj_logs::point.
Referenced by carma_wm::CARMAWorldModel::getLaneletsFromPoint(), getLaneletsFromPoint(), carma_wm::CARMAWorldModel::nonConnectedAdjacentLeft(), nonConnectedAdjacentLeft(), and carma_wm_ctrl::WMBroadcaster::preprocessWorkzoneGeometry().

◆ getLaneletsFromPoint() [2/2]
| std::vector< lanelet::Lanelet > carma_wm::query::getLaneletsFromPoint | ( | const lanelet::LaneletMapPtr & | semantic_map, |
| const lanelet::BasicPoint2d & | point, | ||
| const unsigned int | n = 10 |
||
| ) |
(non-const version) Gets the underlying lanelet, given the cartesian point on the map
- Parameters
-
semantic_map Lanelet Map Ptr point Cartesian point to check the corressponding lanelet n Number of lanelets to return. Default is 10. As there could be many lanelets overlapping.
- Exceptions
-
std::invalid_argument if the map is not set, contains no lanelets
- Returns
- vector of underlying lanelet, empty vector if it is not part of any lanelet
Definition at line 50 of file WorldModelUtils.cpp.
References getLaneletsFromPoint(), and process_traj_logs::point.

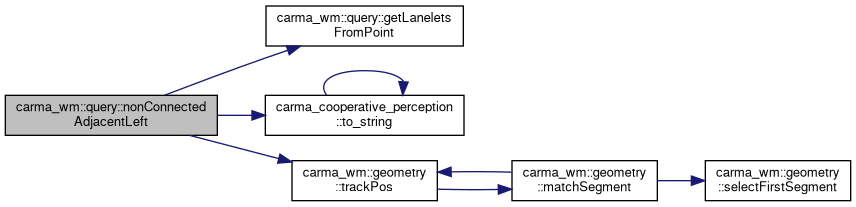
◆ nonConnectedAdjacentLeft() [1/2]
| std::vector< lanelet::ConstLanelet > carma_wm::query::nonConnectedAdjacentLeft | ( | const lanelet::LaneletMapConstPtr & | semantic_map, |
| const lanelet::BasicPoint2d & | input_point, | ||
| const unsigned int | n = 10 |
||
| ) |
Given the cartesian point on the map, tries to get the opposite direction lanelet on the left This function is intended to find "adjacentLeft lanelets" that doesn't share points between lanelets where adjacentLeft of lanelet library fails.
- Parameters
-
semantic_map Lanelet Map Ptr point Cartesian point to check the corressponding lanelet n Number of lanelets to return. Default is 10. As there could be many lanelets overlapping.
- Exceptions
-
std::invalid_argument if the map is not set, contains no lanelets, or if adjacent lanelet is not opposite direction NOTE: Only to be used on 2 lane, opposite direction road. Number of points in all linestrings are assumed to be roughly the same. The point is assumed to be on roughly similar shape of overlapping lanelets if any Enhancement issue for protection against checking if the laneis opposite direction here: https://github.com/usdot-fhwa-stol/carma-platform/issues/1381
- Returns
- vector of underlying lanelet, empty vector if it is not part of any lanelet
Definition at line 79 of file WorldModelUtils.cpp.
References carma_wm::TrackPos::downtrack, getLaneletsFromPoint(), carma_cooperative_perception::to_string(), and carma_wm::geometry::trackPos().
Referenced by nonConnectedAdjacentLeft(), and carma_wm_ctrl::WMBroadcaster::splitOppositeLaneletWithPoint().

◆ nonConnectedAdjacentLeft() [2/2]
| std::vector< lanelet::Lanelet > carma_wm::query::nonConnectedAdjacentLeft | ( | const lanelet::LaneletMapPtr & | semantic_map, |
| const lanelet::BasicPoint2d & | input_point, | ||
| const unsigned int | n = 10 |
||
| ) |
(non-const version) Given the cartesian point on the map, tries to get the opposite direction lanelet on the left This function is intended to find "adjacentLeft lanelets" that doesn't share points between lanelets where adjacentLeft of lanelet library fails
- Parameters
-
semantic_map Lanelet Map Ptr point Cartesian point to check the corressponding lanelet n Number of lanelets to return. Default is 10. As there could be many lanelets overlapping.
- Exceptions
-
std::invalid_argument if the map is not set, contains no lanelets, or if adjacent lanelet is not opposite direction NOTE: Only to be used on 2 lane, opposite direction road. Number of points in all linestrings are assumed to be roughly the same. The point is assumed to be on roughly similar shape of overlapping lanelets if any Enhancement issue for protection against checking if the laneis opposite direction here: https://github.com/usdot-fhwa-stol/carma-platform/issues/1381
- Returns
- vector of underlying lanelet, empty vector if it is not part of any lanelet
Definition at line 63 of file WorldModelUtils.cpp.
References nonConnectedAdjacentLeft(), and process_traj_logs::point.
