Classes | |
| struct | MapOptions |
Functions | |
| lanelet::Point3d | getPoint (double x, double y, double z) |
| helper function for quickly creating a lanelet::Point3d. random id is assigned More... | |
| lanelet::BasicPoint2d | getBasicPoint (double x, double y) |
| helper function for quickly creating a lanelet::BasicPoint. random id is assigned More... | |
| lanelet::Lanelet | getLanelet (lanelet::LineString3d &left_ls, lanelet::LineString3d &right_ls, const lanelet::Attribute &left_sub_type=lanelet::AttributeValueString::SolidSolid, const lanelet::Attribute &right_sub_type=lanelet::AttributeValueString::Solid) |
| helper function for quickly creating a lanelet::Lanelet using linestrings. random id is assigned More... | |
| lanelet::Lanelet | getLanelet (std::vector< lanelet::Point3d > left, std::vector< lanelet::Point3d > right, const lanelet::Attribute &left_sub_type=lanelet::AttributeValueString::SolidSolid, const lanelet::Attribute &right_sub_type=lanelet::AttributeValueString::Solid) |
| helper function for quickly creating a lanelet::Lanelet using points. random id is assigned More... | |
| lanelet::Lanelet | getLanelet (lanelet::Id id, lanelet::LineString3d left_ls, lanelet::LineString3d right_ls, const lanelet::Attribute &left_sub_type=lanelet::AttributeValueString::SolidSolid, const lanelet::Attribute &right_sub_type=lanelet::AttributeValueString::Solid) |
| helper function for quickly creating a lanelet::Lanelet using linestrings. id is specified More... | |
| lanelet::Lanelet | getLanelet (lanelet::Id id, std::vector< lanelet::Point3d > left, std::vector< lanelet::Point3d > right, const lanelet::Attribute &left_sub_type=lanelet::AttributeValueString::SolidSolid, const lanelet::Attribute &right_sub_type=lanelet::AttributeValueString::Solid) |
| helper function for quickly creating a lanelet::Lanelet using points. id is specified More... | |
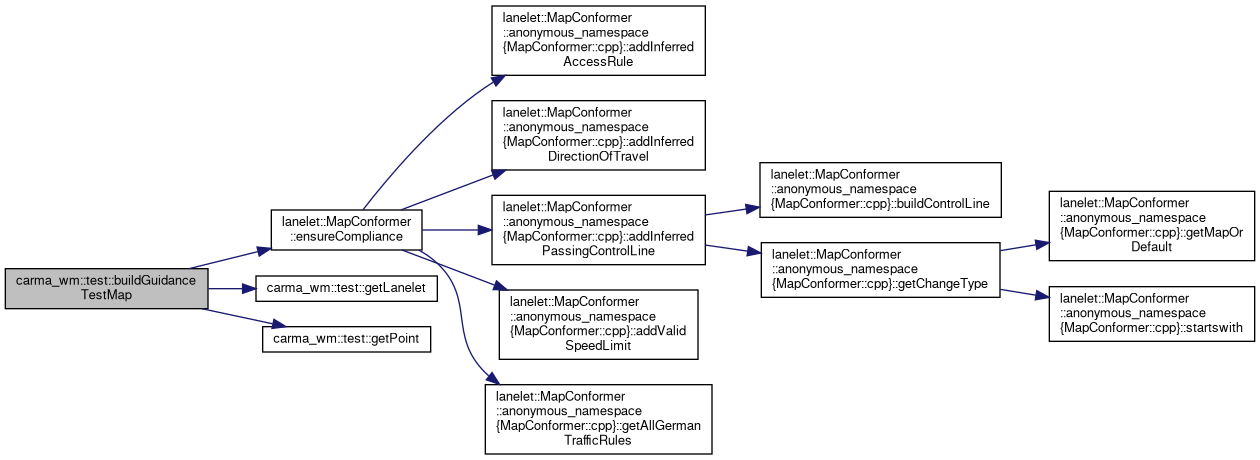
| lanelet::LaneletMapPtr | buildGuidanceTestMap (double width, double length, int num=1) |
| helper function for creating lanelet map for getGuidanceTestMap More... | |
| void | addObstacle (double x, double y, std::shared_ptr< carma_wm::CARMAWorldModel > cmw, std::vector< std::pair< double, double > > pred_coords={}, int time_step=100, double width=3, double length=3) |
| adds a roadway object at the specified cartesian coords More... | |
| void | addObstacle (carma_wm::TrackPos tp, lanelet::Id lanelet_id, std::shared_ptr< carma_wm::CARMAWorldModel > cmw, std::vector< carma_wm::TrackPos > pred_trackpos_list={}, int time_step=100, double width=3, double length=3) |
| adds a roadway object at the specified trackpos relative to the given lanelet id More... | |
| void | setSpeedLimit (lanelet::Velocity speed_limit, std::shared_ptr< carma_wm::CARMAWorldModel > cmw) |
| Sets all lanelets in the map the given speed limit. More... | |
| void | setRouteByLanelets (std::vector< lanelet::ConstLanelet > lanelets, std::shared_ptr< carma_wm::CARMAWorldModel > cmw) |
| Sets the route by series of lanelets. More... | |
| void | setRouteByIds (std::vector< lanelet::Id > lanelet_ids, std::shared_ptr< carma_wm::CARMAWorldModel > cmw) |
| Sets the route by series of lanelets id. More... | |
| void | addTrafficLight (std::shared_ptr< carma_wm::CARMAWorldModel > cmw, lanelet::Id light_id, std::vector< lanelet::Id > entry_lanelet_ids, std::vector< lanelet::Id > exit_lanelet_ids, std::vector< std::pair< boost::posix_time::ptime, lanelet::CarmaTrafficSignalState > > timing_plan={ std::make_pair< boost::posix_time::ptime, lanelet::CarmaTrafficSignalState >(lanelet::time::timeFromSec(0), lanelet::CarmaTrafficSignalState::PROTECTED_MOVEMENT_ALLOWED), std::make_pair< boost::posix_time::ptime, lanelet::CarmaTrafficSignalState >(lanelet::time::timeFromSec(4.0), lanelet::CarmaTrafficSignalState::PROTECTED_CLEARANCE), std::make_pair< boost::posix_time::ptime, lanelet::CarmaTrafficSignalState >(lanelet::time::timeFromSec(24.0), lanelet::CarmaTrafficSignalState::STOP_AND_REMAIN), std::make_pair< boost::posix_time::ptime, lanelet::CarmaTrafficSignalState >(lanelet::time::timeFromSec(44.0), lanelet::CarmaTrafficSignalState::PROTECTED_MOVEMENT_ALLOWED) }) |
| Method adds a traffic light to the provided world model instance NOTE: The stop line for the light will be located at the end of the owning_lanelets (in order) and formed from their two bound end points. NOTE: Exit lanelet matches the entry lanelets by order. More... | |
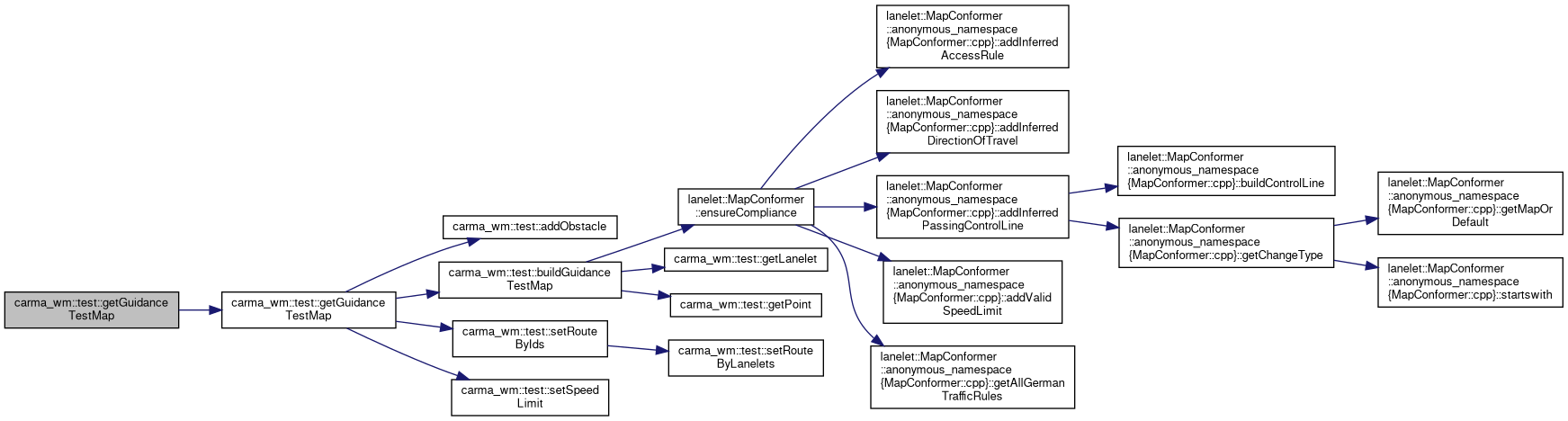
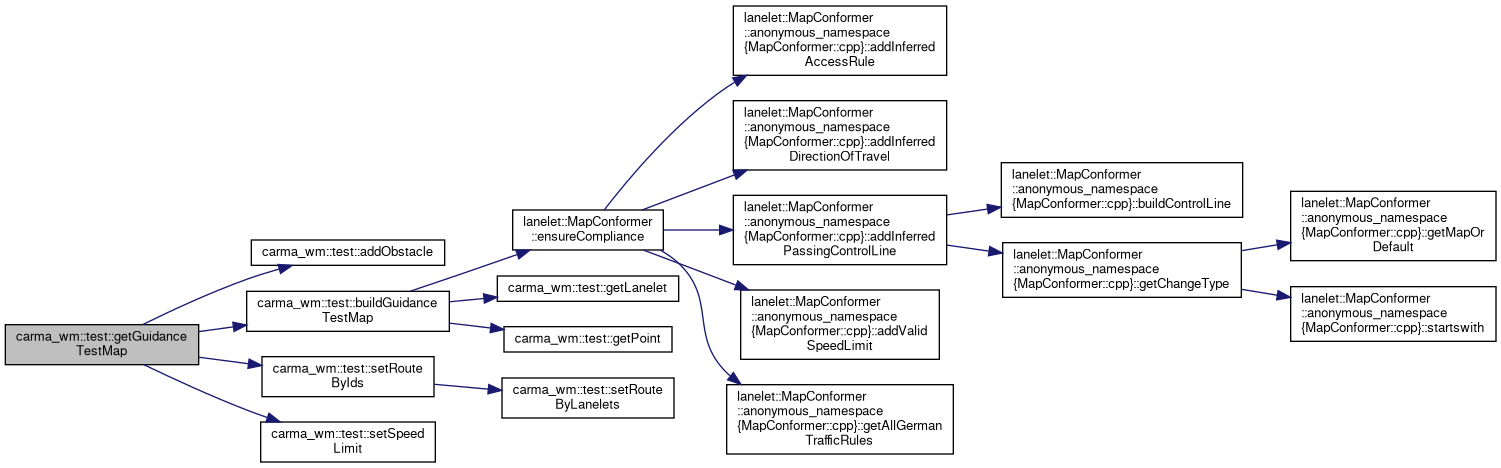
| std::shared_ptr< carma_wm::CARMAWorldModel > | getGuidanceTestMap (MapOptions map_options) |
| Gets the CARMAWorldModel for the guidance test map. More... | |
| std::shared_ptr< carma_wm::CARMAWorldModel > | getGuidanceTestMap () |
Function Documentation
◆ addObstacle() [1/2]
|
inline |
adds a roadway object at the specified trackpos relative to the given lanelet id
- Parameters
-
tp TrackPos relative to the given lanelet_id lanelet_id Lanelet Id to place the roadway object relative to cmw CARMAWorldModel shared ptr pred_trackpos_list vector of TrackPos predicted coords with 1s interval in the future. This is relative to the given lanelet_id time_step time_step interval for each predicted coords (milliseconds) width width of roadway object, default 3 meters length length of roadway object, default 3 meters NOTE: This assumes a similar simple shape of the GuidanceTestMap and does not populate cartesian components of the roadway object.
Definition at line 329 of file WMTestLibForGuidance.hpp.
◆ addObstacle() [2/2]
|
inline |
adds a roadway object at the specified cartesian coords
- Parameters
-
x coord y coord cmw CARMAWorldModel shared ptr pred_coords vector of std::pair(x,y) predicted coords with 1s interval in the future time_step time_step interval for each predicted coords (milliseconds) width width of roadway object, default 3 meters length length of roadway object, default 3 meters NOTE: x,y is the center of your object
Definition at line 266 of file WMTestLibForGuidance.hpp.
Referenced by getGuidanceTestMap().

◆ addTrafficLight()
|
inline |
Method adds a traffic light to the provided world model instance NOTE: The stop line for the light will be located at the end of the owning_lanelets (in order) and formed from their two bound end points. NOTE: Exit lanelet matches the entry lanelets by order.
- Parameters
-
cmw The world model instance to update light_id The lanelet id to use for the generated traffic light regulatory element. This id should NOT be present in the map prior to this method call entry_lanelet_ids The ids of the lanelet which will own the traffic light element. These ids MUST be present in the map prior to this method being called exit_lanelet_ids The ids of the exit lanelet of this traffic light. These ids MUST be present in the map prior to this method being called timeing_plan Optional parameter that is the timing plan to use for the light. The specifications match those of CarmaTrafficSignalState.setStates() The default timing plan is 4sec yewllow, 20sec red, 20sec green
- Exceptions
-
if any of the lanelet is not in map, or entry/exit lanelet sizes do not match
Definition at line 502 of file WMTestLibForGuidance.hpp.
◆ buildGuidanceTestMap()
|
inline |
helper function for creating lanelet map for getGuidanceTestMap
- Parameters
-
width width of single lanelet, default is 3.7 meters which is US standard length length of a single lanelet, default is 25 meters to accomplish 100 meters of full lane num how many number of segments should linestrings of the lanelet have. a.k.a num + 1 points in each linestring
Definition at line 184 of file WMTestLibForGuidance.hpp.
References lanelet::MapConformer::ensureCompliance(), getLanelet(), getPoint(), process_bag::i, and visualize_xodr::length.
Referenced by getGuidanceTestMap().

◆ getBasicPoint()
|
inline |
helper function for quickly creating a lanelet::BasicPoint. random id is assigned
- Parameters
-
x coord y coord
Definition at line 92 of file WMTestLibForGuidance.hpp.
References getPoint(), osm_transform::x, and osm_transform::y.

◆ getGuidanceTestMap() [1/2]
|
inline |
Definition at line 596 of file WMTestLibForGuidance.hpp.
References getGuidanceTestMap().
◆ getGuidanceTestMap() [2/2]
|
inline |
Gets the CARMAWorldModel for the guidance test map.
- Parameters
-
width width of single lanelet, default is 3.7 meters which is US standard length length of a single lanelet, default is 25 meters to accomplish 100 meters of full lane map_options vector of enum map_options. No input is DEFAULT options, but empty vector is NO_OBSTACLE, NO_SPEED_LIMIT options. if mix and match, provide each one explicitly e.g. NO_OBSTACLE, DEFAULT_SPEED_LIMIT NOTE: Input 1/4th of full lane length you want to accomplish in length.
Definition at line 569 of file WMTestLibForGuidance.hpp.
References addObstacle(), buildGuidanceTestMap(), carma_wm::test::MapOptions::DEFAULT, carma_wm::test::MapOptions::lane_length_, carma_wm::test::MapOptions::lane_width_, carma_wm::test::MapOptions::obstacle_, carma_wm::test::MapOptions::seg_num_, setRouteByIds(), setSpeedLimit(), and carma_wm::test::MapOptions::speed_limit_.
Referenced by getGuidanceTestMap().

◆ getLanelet() [1/4]
|
inline |
helper function for quickly creating a lanelet::Lanelet using linestrings. id is specified
- Parameters
-
id lanelet_id to use. it must be never used anywhere before left_ls left linestring to use right_ls right linestring to use left_sub_type left linestring's line type. defaults to double solid line right_sub_type right linestring's line type. defaults to solid line
Definition at line 154 of file WMTestLibForGuidance.hpp.
References getLanelet().

◆ getLanelet() [2/4]
|
inline |
helper function for quickly creating a lanelet::Lanelet using points. id is specified
- Parameters
-
id lanelet_id to use. it must be never used anywhere before left vector of points to use for left linestring right vector of points to use for right linestring left_sub_type left linestring's line type. defaults to double solid line right_sub_type right linestring's line type. defaults to solid line
Definition at line 170 of file WMTestLibForGuidance.hpp.
References getLanelet().

◆ getLanelet() [3/4]
|
inline |
helper function for quickly creating a lanelet::Lanelet using linestrings. random id is assigned
- Parameters
-
left_ls left linestring to use right_ls right linestring to use left_sub_type left linestring's line type. defaults to double solid line right_sub_type right linestring's line type. defaults to solid line
Definition at line 104 of file WMTestLibForGuidance.hpp.
Referenced by buildGuidanceTestMap(), and getLanelet().

◆ getLanelet() [4/4]
|
inline |
helper function for quickly creating a lanelet::Lanelet using points. random id is assigned
- Parameters
-
left vector of points to use for left linestring right vector of points to use for right linestring left_sub_type left linestring's line type. defaults to double solid line right_sub_type right linestring's line type. defaults to solid line
Definition at line 135 of file WMTestLibForGuidance.hpp.
References getLanelet().

◆ getPoint()
|
inline |
helper function for quickly creating a lanelet::Point3d. random id is assigned
- Parameters
-
x coord y coord z coord
Definition at line 83 of file WMTestLibForGuidance.hpp.
References osm_transform::x, and osm_transform::y.
Referenced by buildGuidanceTestMap(), and getBasicPoint().

◆ setRouteByIds()
|
inline |
Sets the route by series of lanelets id.
- Parameters
-
lanelets lanelets that you want the route to follow cmw CARMAWorldModel shared_ptr
- Exceptions
-
std::invalid_argument if fewer than 2 lanelets passed, or the given lanelets are not routable
Definition at line 476 of file WMTestLibForGuidance.hpp.
References setRouteByLanelets().
Referenced by getGuidanceTestMap().


◆ setRouteByLanelets()
|
inline |
Sets the route by series of lanelets.
- Parameters
-
lanelets lanelets that you want the route to follow cmw CARMAWorldModel shared_ptr
- Exceptions
-
std::invalid_argument if fewer than 2 lanelets passed, or the given lanelets are not routable
Definition at line 433 of file WMTestLibForGuidance.hpp.
Referenced by setRouteByIds().

◆ setSpeedLimit()
|
inline |
Sets all lanelets in the map the given speed limit.
- Parameters
-
speed_limit speed limit value to set cmw CARMAWorldModel
- Exceptions
-
std::invalid_argument if the map is not set, contains no lanelets NOTE: this overwrites existing speed limit regulatory elements in the map
Definition at line 402 of file WMTestLibForGuidance.hpp.
Referenced by getGuidanceTestMap().
