#include <TrafficControl.hpp>
Public Member Functions | |
| TrafficControl () | |
| TrafficControl (boost::uuids::uuid id, std::vector< std::pair< lanelet::Id, lanelet::RegulatoryElementPtr > > update_list, std::vector< std::pair< lanelet::Id, lanelet::RegulatoryElementPtr > > remove_list, std::vector< lanelet::Lanelet > lanelet_addition) | |
Public Attributes | |
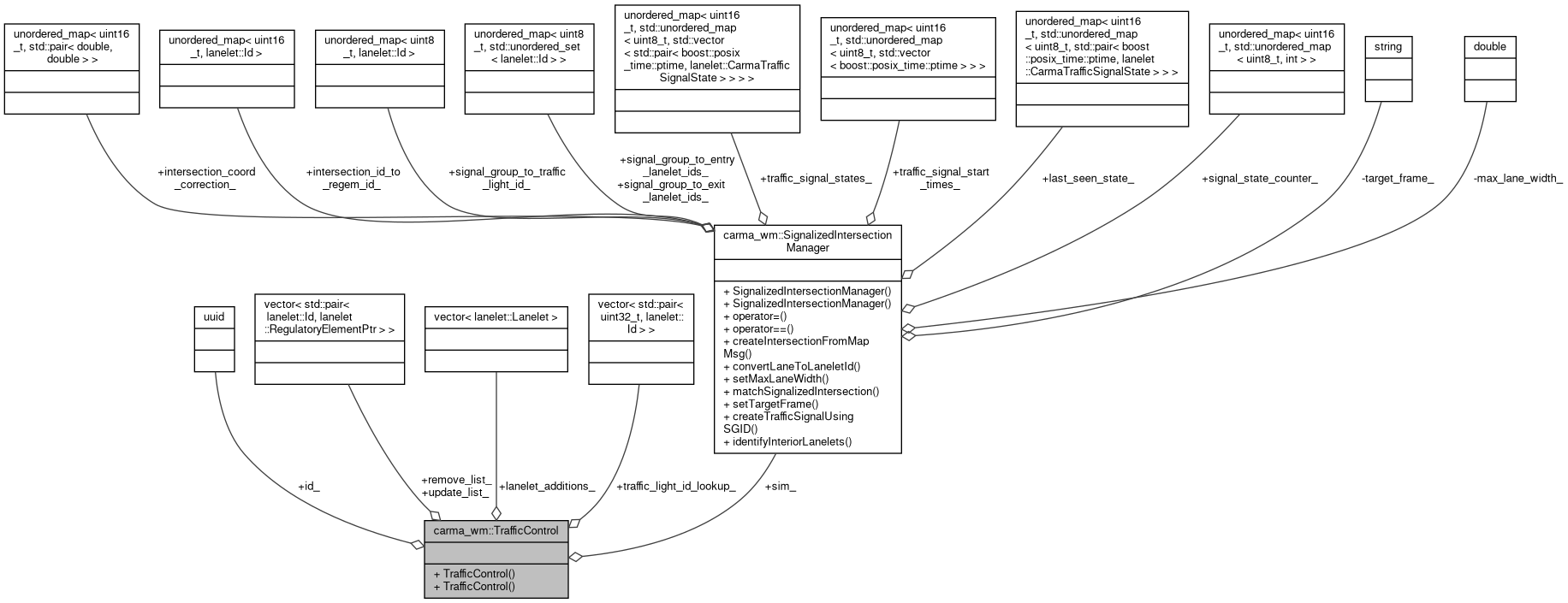
| boost::uuids::uuid | id_ |
| std::vector< std::pair< lanelet::Id, lanelet::RegulatoryElementPtr > > | update_list_ |
| std::vector< std::pair< lanelet::Id, lanelet::RegulatoryElementPtr > > | remove_list_ |
| std::vector< lanelet::Lanelet > | lanelet_additions_ |
| std::vector< std::pair< uint32_t, lanelet::Id > > | traffic_light_id_lookup_ |
| carma_wm::SignalizedIntersectionManager | sim_ |
Detailed Description
Definition at line 49 of file TrafficControl.hpp.
Constructor & Destructor Documentation
◆ TrafficControl() [1/2]
|
inline |
Definition at line 52 of file TrafficControl.hpp.
◆ TrafficControl() [2/2]
|
inline |
Definition at line 53 of file TrafficControl.hpp.
Member Data Documentation
◆ id_
| boost::uuids::uuid carma_wm::TrafficControl::id_ |
Definition at line 59 of file TrafficControl.hpp.
Referenced by boost::serialization::load(), and boost::serialization::save().
◆ lanelet_additions_
| std::vector<lanelet::Lanelet> carma_wm::TrafficControl::lanelet_additions_ |
Definition at line 66 of file TrafficControl.hpp.
Referenced by boost::serialization::load(), and boost::serialization::save().
◆ remove_list_
| std::vector<std::pair<lanelet::Id, lanelet::RegulatoryElementPtr> > carma_wm::TrafficControl::remove_list_ |
Definition at line 63 of file TrafficControl.hpp.
Referenced by boost::serialization::load(), and boost::serialization::save().
◆ sim_
| carma_wm::SignalizedIntersectionManager carma_wm::TrafficControl::sim_ |
Definition at line 72 of file TrafficControl.hpp.
Referenced by boost::serialization::load(), and boost::serialization::save().
◆ traffic_light_id_lookup_
| std::vector<std::pair<uint32_t, lanelet::Id> > carma_wm::TrafficControl::traffic_light_id_lookup_ |
Definition at line 69 of file TrafficControl.hpp.
Referenced by boost::serialization::load(), and boost::serialization::save().
◆ update_list_
| std::vector<std::pair<lanelet::Id, lanelet::RegulatoryElementPtr> > carma_wm::TrafficControl::update_list_ |
Definition at line 62 of file TrafficControl.hpp.
Referenced by boost::serialization::load(), and boost::serialization::save().
The documentation for this class was generated from the following file:
- carma_wm/include/carma_wm/TrafficControl.hpp