#include <lightbar_manager_sm.hpp>
Public Member Functions | |
| LightBarManagerStateMachine () | |
| Default constructor for LightBarManagerStateMachine. More... | |
| void | next (const LightBarEvent &event) |
| Transition to the next state of the LightBarStateMachine. More... | |
| LightBarState | getCurrentState () |
| Get current state machine status. More... | |
| void | handleStateChange (const carma_planning_msgs::msg::GuidanceState &msg) |
| This function triggers the transitioning to the next state in LightBarStateMachine based on the guidance state change. More... | |
Private Member Functions | |
| void | onDisengage () |
| void | onActive () |
| void | onEngage () |
Private Attributes | |
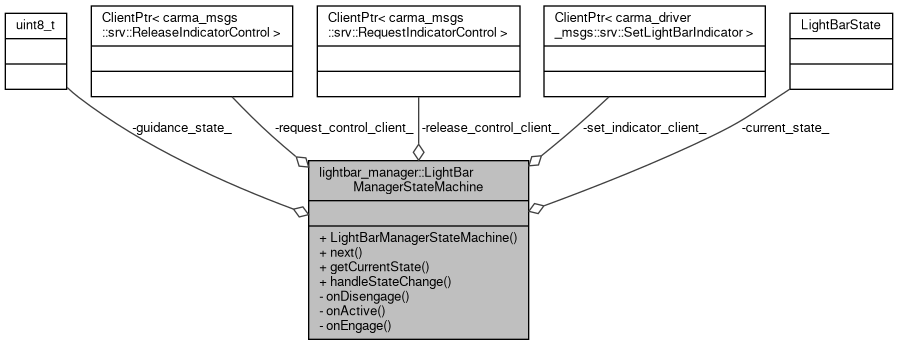
| uint8_t | guidance_state_ = carma_planning_msgs::msg::GuidanceState::SHUTDOWN |
| carma_ros2_utils::ClientPtr< carma_msgs::srv::ReleaseIndicatorControl > | request_control_client_ |
| carma_ros2_utils::ClientPtr< carma_msgs::srv::RequestIndicatorControl > | release_control_client_ |
| carma_ros2_utils::ClientPtr< carma_driver_msgs::srv::SetLightBarIndicator > | set_indicator_client_ |
| LightBarState | current_state_ = DISENGAGED |
Detailed Description
Definition at line 53 of file lightbar_manager_sm.hpp.
Constructor & Destructor Documentation
◆ LightBarManagerStateMachine()
| lightbar_manager::LightBarManagerStateMachine::LightBarManagerStateMachine | ( | ) |
Default constructor for LightBarManagerStateMachine.
Definition at line 22 of file lightbar_manager_sm.cpp.
Member Function Documentation
◆ getCurrentState()
| LightBarState lightbar_manager::LightBarManagerStateMachine::getCurrentState | ( | ) |
Get current state machine status.
Definition at line 114 of file lightbar_manager_sm.cpp.
References current_state_.
Referenced by lightbar_manager::LightBarManagerWorker::getCurrentState().

◆ handleStateChange()
| void lightbar_manager::LightBarManagerStateMachine::handleStateChange | ( | const carma_planning_msgs::msg::GuidanceState & | msg | ) |
This function triggers the transitioning to the next state in LightBarStateMachine based on the guidance state change.
Definition at line 62 of file lightbar_manager_sm.cpp.
References lightbar_manager::ACTIVE, lightbar_manager::ENGAGED, guidance_state_, port_drayage_plugin::INACTIVE, onActive(), onDisengage(), onEngage(), and arbitrator::SHUTDOWN.
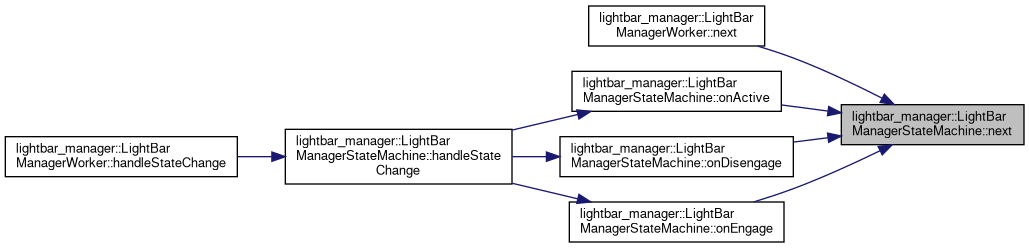
Referenced by lightbar_manager::LightBarManagerWorker::handleStateChange().

◆ next()
| void lightbar_manager::LightBarManagerStateMachine::next | ( | const LightBarEvent & | event | ) |
Transition to the next state of the LightBarStateMachine.
Definition at line 25 of file lightbar_manager_sm.cpp.
References lightbar_manager::ACTIVE, current_state_, lightbar_manager::DISENGAGED, lightbar_manager::ENGAGED, lightbar_manager::GUIDANCE_CONNECTED, lightbar_manager::GUIDANCE_DISCONNECTED, lightbar_manager::GUIDANCE_DISENGAGED, and lightbar_manager::GUIDANCE_ENGAGED.
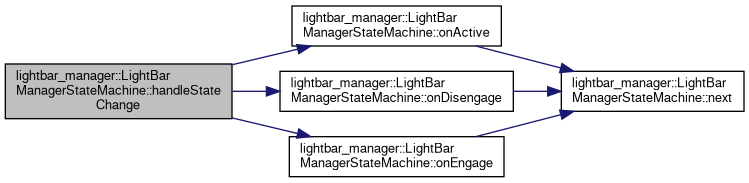
Referenced by lightbar_manager::LightBarManagerWorker::next(), onActive(), onDisengage(), and onEngage().
◆ onActive()
|
private |
Definition at line 98 of file lightbar_manager_sm.cpp.
References lightbar_manager::ENGAGED, lightbar_manager::GUIDANCE_CONNECTED, lightbar_manager::GUIDANCE_DISCONNECTED, guidance_state_, and next().
Referenced by handleStateChange().


◆ onDisengage()
|
private |
Definition at line 93 of file lightbar_manager_sm.cpp.
References lightbar_manager::GUIDANCE_DISENGAGED, and next().
Referenced by handleStateChange().


◆ onEngage()
|
private |
Definition at line 108 of file lightbar_manager_sm.cpp.
References lightbar_manager::GUIDANCE_ENGAGED, and next().
Referenced by handleStateChange().


Member Data Documentation
◆ current_state_
|
private |
Definition at line 94 of file lightbar_manager_sm.hpp.
Referenced by getCurrentState(), and next().
◆ guidance_state_
|
private |
Definition at line 86 of file lightbar_manager_sm.hpp.
Referenced by handleStateChange(), and onActive().
◆ release_control_client_
|
private |
Definition at line 90 of file lightbar_manager_sm.hpp.
◆ request_control_client_
|
private |
Definition at line 89 of file lightbar_manager_sm.hpp.
◆ set_indicator_client_
|
private |
Definition at line 91 of file lightbar_manager_sm.hpp.
The documentation for this class was generated from the following files:
- lightbar_manager/include/lightbar_manager/lightbar_manager_sm.hpp
- lightbar_manager/src/lightbar_manager_sm.cpp