Class defining the state transition table behavior for the LocalizationManager. More...
#include <LocalizationTransitionTable.hpp>
Public Types | |
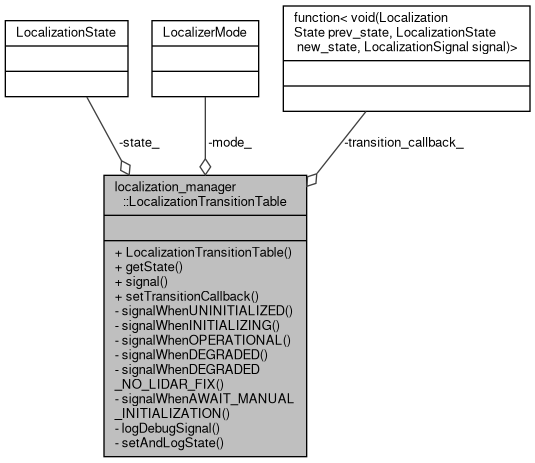
| using | TransitionCallback = std::function< void(LocalizationState prev_state, LocalizationState new_state, LocalizationSignal signal)> |
Public Member Functions | |
| LocalizationTransitionTable (LocalizerMode mode) | |
| Constructor. More... | |
| LocalizationState | getState () const |
| Returns the current state. More... | |
| void | signal (LocalizationSignal signal) |
| Trigger signal for the transition table. More... | |
| void | setTransitionCallback (TransitionCallback cb) |
| Callback setting function. The provided callback will be triggered any time the current state changes to a new state. More... | |
Private Member Functions | |
| void | signalWhenUNINITIALIZED (LocalizationSignal signal) |
| void | signalWhenINITIALIZING (LocalizationSignal signal) |
| void | signalWhenOPERATIONAL (LocalizationSignal signal) |
| void | signalWhenDEGRADED (LocalizationSignal signal) |
| void | signalWhenDEGRADED_NO_LIDAR_FIX (LocalizationSignal signal) |
| void | signalWhenAWAIT_MANUAL_INITIALIZATION (LocalizationSignal signal) |
| void | logDebugSignal (LocalizationSignal signal) const |
| Helper function for logging the provide signal. More... | |
| void | setAndLogState (LocalizationState new_state, LocalizationSignal source_signal) |
| Function to change the current state and log the details of the transition. More... | |
Private Attributes | |
| LocalizationState | state_ = LocalizationState::UNINITIALIZED |
| Current state. This state should only ever be set using the setAndLogState() function. More... | |
| LocalizerMode | mode_ = LocalizerMode::AUTO_WITHOUT_TIMEOUT |
| TransitionCallback | transition_callback_ |
Detailed Description
Class defining the state transition table behavior for the LocalizationManager.
Definition at line 26 of file LocalizationTransitionTable.hpp.
Member Typedef Documentation
◆ TransitionCallback
| using localization_manager::LocalizationTransitionTable::TransitionCallback = std::function<void(LocalizationState prev_state, LocalizationState new_state, LocalizationSignal signal)> |
Definition at line 29 of file LocalizationTransitionTable.hpp.
Constructor & Destructor Documentation
◆ LocalizationTransitionTable()
| localization_manager::LocalizationTransitionTable::LocalizationTransitionTable | ( | LocalizerMode | mode | ) |
Constructor.
- Parameters
-
mode Defines the operational mode of the state machine which modifies some of the state transitions
Definition at line 22 of file LocalizationTransitionTable.cpp.
Member Function Documentation
◆ getState()
| LocalizationState localization_manager::LocalizationTransitionTable::getState | ( | ) | const |
Returns the current state.
- Returns
- Current state
Definition at line 24 of file LocalizationTransitionTable.cpp.
References state_.
Referenced by localization_manager::LocalizationManager::getState(), localization_manager::LocalizationManager::gnssPoseCallback(), localization_manager::LocalizationManager::poseAndStatsCallback(), localization_manager::LocalizationManager::posePubTick(), and localization_manager::LocalizationManager::timerCallback().
◆ logDebugSignal()
|
private |
Helper function for logging the provide signal.
- Parameters
-
signal The signal to be logged
Definition at line 29 of file LocalizationTransitionTable.cpp.
References signal(), and state_.
Referenced by signalWhenAWAIT_MANUAL_INITIALIZATION(), signalWhenDEGRADED(), signalWhenDEGRADED_NO_LIDAR_FIX(), signalWhenINITIALIZING(), signalWhenOPERATIONAL(), and signalWhenUNINITIALIZED().
◆ setAndLogState()
|
private |
Function to change the current state and log the details of the transition.
- Parameters
-
new_state The state to set. source_signal The signal which caused the new_state to be set
Definition at line 34 of file LocalizationTransitionTable.cpp.
References mode_, state_, and transition_callback_.
Referenced by signalWhenAWAIT_MANUAL_INITIALIZATION(), signalWhenDEGRADED(), signalWhenDEGRADED_NO_LIDAR_FIX(), signalWhenINITIALIZING(), signalWhenOPERATIONAL(), and signalWhenUNINITIALIZED().
◆ setTransitionCallback()
| void localization_manager::LocalizationTransitionTable::setTransitionCallback | ( | TransitionCallback | cb | ) |
Callback setting function. The provided callback will be triggered any time the current state changes to a new state.
- Parameters
-
cb The callback function which will be provided with the previous state, new current state, and the signal which caused the transition.
Definition at line 247 of file LocalizationTransitionTable.cpp.
References transition_callback_.
Referenced by localization_manager::LocalizationManager::LocalizationManager().
◆ signal()
| void localization_manager::LocalizationTransitionTable::signal | ( | LocalizationSignal | signal | ) |
Trigger signal for the transition table.
- Parameters
-
signal The signal for the transition table to evaluate
Definition at line 219 of file LocalizationTransitionTable.cpp.
References localization_manager::AWAIT_MANUAL_INITIALIZATION, localization_manager::DEGRADED, localization_manager::DEGRADED_NO_LIDAR_FIX, localization_manager::INITIALIZING, localization_manager::OPERATIONAL, signal(), signalWhenAWAIT_MANUAL_INITIALIZATION(), signalWhenDEGRADED(), signalWhenDEGRADED_NO_LIDAR_FIX(), signalWhenINITIALIZING(), signalWhenOPERATIONAL(), signalWhenUNINITIALIZED(), state_, and localization_manager::UNINITIALIZED.
Referenced by localization_manager::LocalizationManager::gnssPoseCallback(), localization_manager::LocalizationManager::initialPoseCallback(), logDebugSignal(), localization_manager::LocalizationManager::poseAndStatsCallback(), localization_manager::LocalizationManager::posePubTick(), signal(), signalWhenAWAIT_MANUAL_INITIALIZATION(), signalWhenDEGRADED(), signalWhenDEGRADED_NO_LIDAR_FIX(), signalWhenINITIALIZING(), signalWhenOPERATIONAL(), signalWhenUNINITIALIZED(), localization_manager::LocalizationManager::systemAlertCallback(), and localization_manager::LocalizationManager::timerCallback().
◆ signalWhenAWAIT_MANUAL_INITIALIZATION()
|
private |
Definition at line 199 of file LocalizationTransitionTable.cpp.
References localization_manager::DEGRADED_NO_LIDAR_FIX, localization_manager::GNSS, localization_manager::GNSS_WITH_FIXED_OFFSET, localization_manager::INITIAL_POSE, localization_manager::INITIALIZING, logDebugSignal(), mode_, setAndLogState(), and signal().
Referenced by signal().
◆ signalWhenDEGRADED()
|
private |
Definition at line 133 of file LocalizationTransitionTable.cpp.
References localization_manager::AUTO_WITH_TIMEOUT, localization_manager::AUTO_WITHOUT_TIMEOUT, localization_manager::AWAIT_MANUAL_INITIALIZATION, localization_manager::DEGRADED_NO_LIDAR_FIX, localization_manager::GOOD_NDT_FREQ_AND_FITNESS_SCORE, localization_manager::INITIAL_POSE, localization_manager::INITIALIZING, localization_manager::LIDAR_SENSOR_FAILURE, logDebugSignal(), mode_, localization_manager::OPERATIONAL, setAndLogState(), signal(), and localization_manager::UNUSABLE_NDT_FREQ_OR_FITNESS_SCORE.
Referenced by signal().
◆ signalWhenDEGRADED_NO_LIDAR_FIX()
|
private |
Definition at line 169 of file LocalizationTransitionTable.cpp.
References localization_manager::AUTO_WITHOUT_TIMEOUT, localization_manager::AWAIT_MANUAL_INITIALIZATION, localization_manager::GNSS, localization_manager::GNSS_DATA_TIMEOUT, localization_manager::GNSS_WITH_FIXED_OFFSET, localization_manager::GNSS_WITH_NDT_INIT, localization_manager::GOOD_NDT_FREQ_AND_FITNESS_SCORE, localization_manager::INITIAL_POSE, localization_manager::INITIALIZING, logDebugSignal(), mode_, localization_manager::OPERATIONAL, setAndLogState(), signal(), and localization_manager::TIMEOUT.
Referenced by signal().
◆ signalWhenINITIALIZING()
|
private |
Definition at line 70 of file LocalizationTransitionTable.cpp.
References localization_manager::AWAIT_MANUAL_INITIALIZATION, localization_manager::DEGRADED, localization_manager::DEGRADED_NO_LIDAR_FIX, localization_manager::GOOD_NDT_FREQ_AND_FITNESS_SCORE, localization_manager::LIDAR_SENSOR_FAILURE, logDebugSignal(), mode_, localization_manager::NDT, localization_manager::OPERATIONAL, localization_manager::POOR_NDT_FREQ_OR_FITNESS_SCORE, setAndLogState(), signal(), and localization_manager::TIMEOUT.
Referenced by signal().
◆ signalWhenOPERATIONAL()
|
private |
Definition at line 100 of file LocalizationTransitionTable.cpp.
References localization_manager::AUTO_WITH_TIMEOUT, localization_manager::AUTO_WITHOUT_TIMEOUT, localization_manager::AWAIT_MANUAL_INITIALIZATION, localization_manager::DEGRADED, localization_manager::DEGRADED_NO_LIDAR_FIX, localization_manager::GNSS_WITH_NDT_INIT, localization_manager::INITIAL_POSE, localization_manager::INITIALIZING, localization_manager::LIDAR_INITIALIZED_SWITCH_TO_GPS, localization_manager::LIDAR_SENSOR_FAILURE, logDebugSignal(), mode_, localization_manager::POOR_NDT_FREQ_OR_FITNESS_SCORE, setAndLogState(), signal(), and localization_manager::UNUSABLE_NDT_FREQ_OR_FITNESS_SCORE.
Referenced by signal().
◆ signalWhenUNINITIALIZED()
|
private |
Definition at line 50 of file LocalizationTransitionTable.cpp.
References localization_manager::DEGRADED_NO_LIDAR_FIX, localization_manager::GNSS, localization_manager::GNSS_WITH_FIXED_OFFSET, localization_manager::INITIAL_POSE, localization_manager::INITIALIZING, logDebugSignal(), mode_, setAndLogState(), and signal().
Referenced by signal().
Member Data Documentation
◆ mode_
|
private |
Definition at line 65 of file LocalizationTransitionTable.hpp.
Referenced by setAndLogState(), signalWhenAWAIT_MANUAL_INITIALIZATION(), signalWhenDEGRADED(), signalWhenDEGRADED_NO_LIDAR_FIX(), signalWhenINITIALIZING(), signalWhenOPERATIONAL(), and signalWhenUNINITIALIZED().
◆ state_
|
private |
Current state. This state should only ever be set using the setAndLogState() function.
Definition at line 63 of file LocalizationTransitionTable.hpp.
Referenced by getState(), logDebugSignal(), setAndLogState(), and signal().
◆ transition_callback_
|
private |
Definition at line 67 of file LocalizationTransitionTable.hpp.
Referenced by setAndLogState(), and setTransitionCallback().
The documentation for this class was generated from the following files:
- localization_manager/include/localization_manager/LocalizationTransitionTable.hpp
- localization_manager/src/LocalizationTransitionTable.cpp