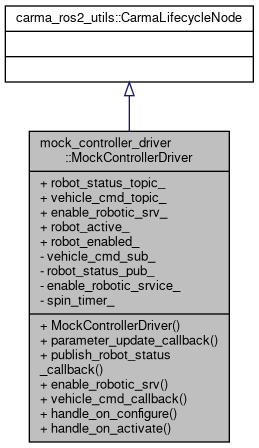
responsible for replicating behavior of control driver More...
#include <mock_controller_driver_node.hpp>
Public Member Functions | |
| MockControllerDriver (const rclcpp::NodeOptions &) | |
| MockControllerDriver constructor. More... | |
| rcl_interfaces::msg::SetParametersResult | parameter_update_callback (const std::vector< rclcpp::Parameter > ¶meters) |
| Callback for dynamic parameter updates. More... | |
| void | publish_robot_status_callback () |
| Timer callback, to publish robot status message. More... | |
| bool | enable_robotic_srv (std::shared_ptr< rmw_request_id_t >, const std::shared_ptr< carma_driver_msgs::srv::SetEnableRobotic::Request > request, std::shared_ptr< carma_driver_msgs::srv::SetEnableRobotic::Response > response) |
| Callback for the enable robotic service. Triggering this callback will modify the RobotEnabled message output by this driver. This service enables the robotic drive-by-wire controller. More... | |
| void | vehicle_cmd_callback (const autoware_msgs::msg::VehicleCmd::UniquePtr msg) |
| Callback for the vehicle command topic. This callback must be triggered at least once before the enable robotic service is called. More... | |
| carma_ros2_utils::CallbackReturn | handle_on_configure (const rclcpp_lifecycle::State &prev_state) |
| carma_ros2_utils::CallbackReturn | handle_on_activate (const rclcpp_lifecycle::State &) |
Public Attributes | |
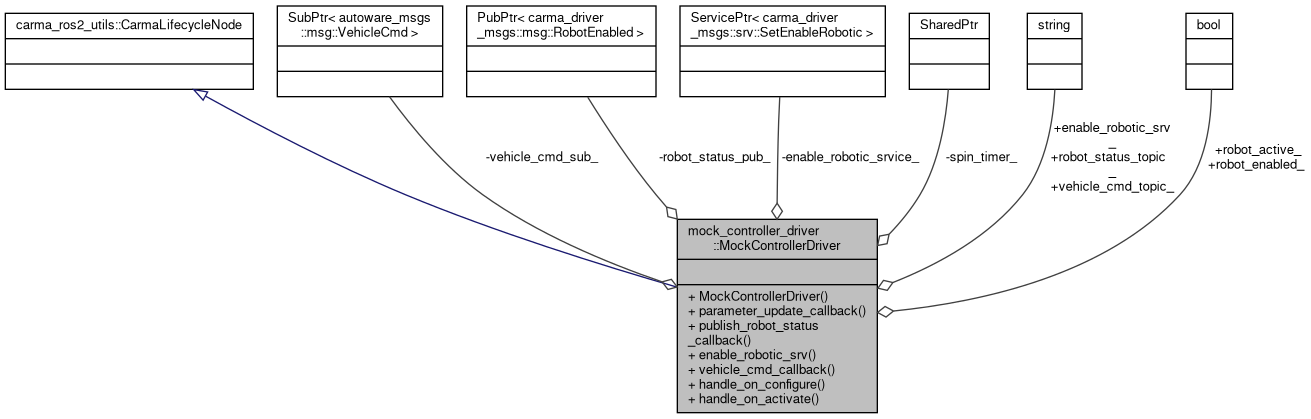
| const std::string | robot_status_topic_ = "controller/robot_status" |
| const std::string | vehicle_cmd_topic_ = "vehicle_cmd" |
| const std::string | enable_robotic_srv_ = "controller/enable_robotic" |
| bool | robot_active_ = false |
| bool | robot_enabled_ = false |
Private Attributes | |
| carma_ros2_utils::SubPtr< autoware_msgs::msg::VehicleCmd > | vehicle_cmd_sub_ |
| carma_ros2_utils::PubPtr< carma_driver_msgs::msg::RobotEnabled > | robot_status_pub_ |
| carma_ros2_utils::ServicePtr< carma_driver_msgs::srv::SetEnableRobotic > | enable_robotic_srvice_ |
| rclcpp::TimerBase::SharedPtr | spin_timer_ |
Detailed Description
responsible for replicating behavior of control driver
Definition at line 37 of file mock_controller_driver_node.hpp.
Constructor & Destructor Documentation
◆ MockControllerDriver()
|
explicit |
MockControllerDriver constructor.
Definition at line 22 of file mock_controller_driver_node.cpp.
Member Function Documentation
◆ enable_robotic_srv()
| bool mock_controller_driver::MockControllerDriver::enable_robotic_srv | ( | std::shared_ptr< rmw_request_id_t > | , |
| const std::shared_ptr< carma_driver_msgs::srv::SetEnableRobotic::Request > | request, | ||
| std::shared_ptr< carma_driver_msgs::srv::SetEnableRobotic::Response > | response | ||
| ) |
Callback for the enable robotic service. Triggering this callback will modify the RobotEnabled message output by this driver. This service enables the robotic drive-by-wire controller.
- Parameters
-
request The service request in message response The service response out message
- Returns
- Flag idicating if the service was processed successfully.
Definition at line 65 of file mock_controller_driver_node.cpp.
References robot_active_, and robot_enabled_.
Referenced by handle_on_configure().

◆ handle_on_activate()
| carma_ros2_utils::CallbackReturn mock_controller_driver::MockControllerDriver::handle_on_activate | ( | const rclcpp_lifecycle::State & | prev_state | ) |
Definition at line 48 of file mock_controller_driver_node.cpp.
References publish_robot_status_callback(), and spin_timer_.
◆ handle_on_configure()
| carma_ros2_utils::CallbackReturn mock_controller_driver::MockControllerDriver::handle_on_configure | ( | const rclcpp_lifecycle::State & | prev_state | ) |
Definition at line 29 of file mock_controller_driver_node.cpp.
References enable_robotic_srv(), enable_robotic_srv_, enable_robotic_srvice_, robot_status_pub_, robot_status_topic_, vehicle_cmd_callback(), vehicle_cmd_sub_, and vehicle_cmd_topic_.

◆ parameter_update_callback()
| rcl_interfaces::msg::SetParametersResult mock_controller_driver::MockControllerDriver::parameter_update_callback | ( | const std::vector< rclcpp::Parameter > & | parameters | ) |
Callback for dynamic parameter updates.
◆ publish_robot_status_callback()
| void mock_controller_driver::MockControllerDriver::publish_robot_status_callback | ( | ) |
Timer callback, to publish robot status message.
Definition at line 81 of file mock_controller_driver_node.cpp.
References robot_active_, robot_enabled_, and robot_status_pub_.
Referenced by handle_on_activate().
◆ vehicle_cmd_callback()
| void mock_controller_driver::MockControllerDriver::vehicle_cmd_callback | ( | const autoware_msgs::msg::VehicleCmd::UniquePtr | msg | ) |
Callback for the vehicle command topic. This callback must be triggered at least once before the enable robotic service is called.
- Parameters
-
msg The vehicle command to receive
Definition at line 60 of file mock_controller_driver_node.cpp.
References robot_enabled_.
Referenced by handle_on_configure().

Member Data Documentation
◆ enable_robotic_srv_
| const std::string mock_controller_driver::MockControllerDriver::enable_robotic_srv_ = "controller/enable_robotic" |
Definition at line 64 of file mock_controller_driver_node.hpp.
Referenced by handle_on_configure().
◆ enable_robotic_srvice_
|
private |
Definition at line 49 of file mock_controller_driver_node.hpp.
Referenced by handle_on_configure().
◆ robot_active_
| bool mock_controller_driver::MockControllerDriver::robot_active_ = false |
Definition at line 67 of file mock_controller_driver_node.hpp.
Referenced by enable_robotic_srv(), and publish_robot_status_callback().
◆ robot_enabled_
| bool mock_controller_driver::MockControllerDriver::robot_enabled_ = false |
Definition at line 68 of file mock_controller_driver_node.hpp.
Referenced by enable_robotic_srv(), publish_robot_status_callback(), and vehicle_cmd_callback().
◆ robot_status_pub_
|
private |
Definition at line 45 of file mock_controller_driver_node.hpp.
Referenced by handle_on_configure(), and publish_robot_status_callback().
◆ robot_status_topic_
| const std::string mock_controller_driver::MockControllerDriver::robot_status_topic_ = "controller/robot_status" |
Definition at line 58 of file mock_controller_driver_node.hpp.
Referenced by handle_on_configure().
◆ spin_timer_
|
private |
Definition at line 52 of file mock_controller_driver_node.hpp.
Referenced by handle_on_activate().
◆ vehicle_cmd_sub_
|
private |
Definition at line 42 of file mock_controller_driver_node.hpp.
Referenced by handle_on_configure().
◆ vehicle_cmd_topic_
| const std::string mock_controller_driver::MockControllerDriver::vehicle_cmd_topic_ = "vehicle_cmd" |
Definition at line 61 of file mock_controller_driver_node.hpp.
Referenced by handle_on_configure().
The documentation for this class was generated from the following files:
- mock_controller_driver/include/mock_controller_driver/mock_controller_driver_node.hpp
- mock_controller_driver/src/mock_controller_driver_node.cpp