#include <MockLightBarDriver.hpp>
Public Member Functions | |
| MockLightBarDriver (ros::CARMANodeHandle node) | |
| void | publishData () |
| void | publishDriverStatus () |
| string | getNodeName () |
| vector< string > | getDriverTypesList () |
Private Member Functions | |
| bool | getDriverStatus_cb (cav_srvs::GetDriverStatusRequest &req, cav_srvs::GetDriverStatusResponse &resp) |
| bool | bind_cb (cav_srvs::BindRequest &req, cav_srvs::BindResponse &resp) |
| bool | getApiService_cb (cav_srvs::GetDriverApiRequest &req, cav_srvs::GetDriverApiResponse &resp) |
| bool | setLightService_cb (cav_srvs::SetLightsRequest &req, cav_srvs::SetLightsResponse &resp) |
| bool | getLightService_cb (cav_srvs::GetLightsRequest &req, cav_srvs::GetLightsResponse &resp) |
| cav_msgs::LightBarStatus | getLightBarStatus () |
| cav_msgs::DriverStatus | getDriverStatus () |
| vector< string > | getDriverApi () |
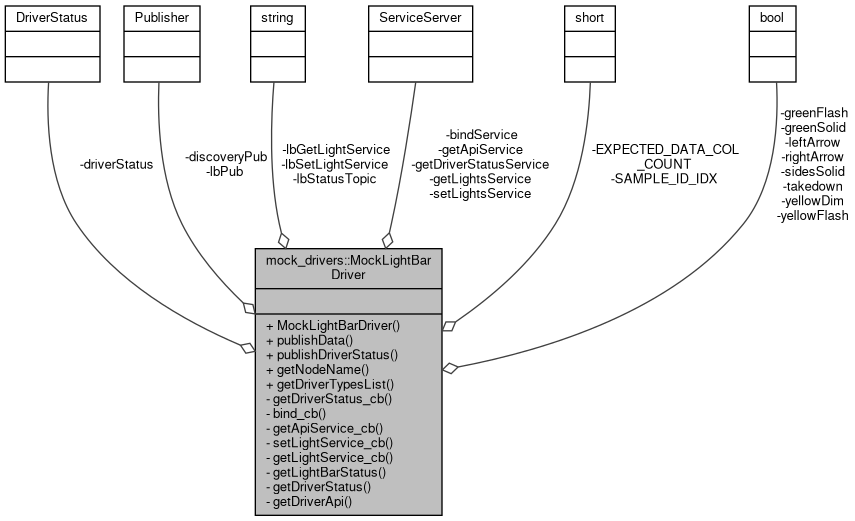
Private Attributes | |
| cav_msgs::DriverStatus | driverStatus |
| ros::Publisher | lbPub |
| string | lbStatusTopic |
| ros::Publisher | discoveryPub |
| ros::ServiceServer | getLightsService |
| ros::ServiceServer | setLightsService |
| ros::ServiceServer | getApiService |
| ros::ServiceServer | bindService |
| ros::ServiceServer | getDriverStatusService |
| string | lbGetLightService |
| string | lbSetLightService |
| short | EXPECTED_DATA_COL_COUNT |
| short | SAMPLE_ID_IDX |
| bool | greenFlash |
| bool | yellowFlash |
| bool | leftArrow |
| bool | rightArrow |
| bool | sidesSolid |
| bool | greenSolid |
| bool | yellowDim |
| bool | takedown |
Detailed Description
Definition at line 45 of file MockLightBarDriver.hpp.
Constructor & Destructor Documentation
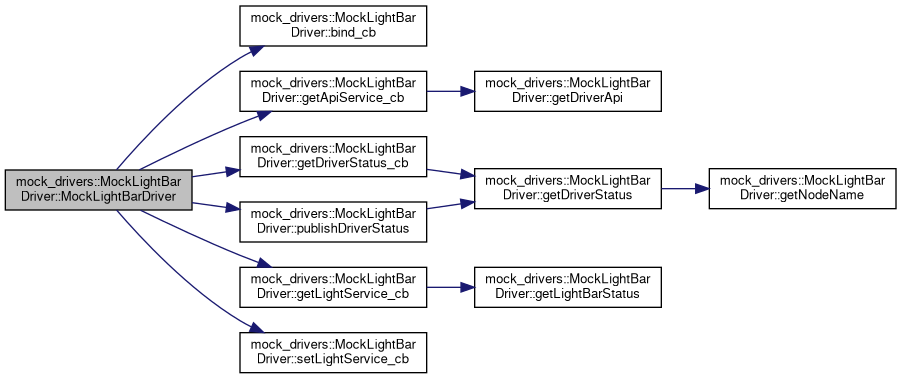
◆ MockLightBarDriver()
| mock_drivers::MockLightBarDriver::MockLightBarDriver | ( | ros::CARMANodeHandle | node | ) |
Definition at line 35 of file MockLightBarDriver.cpp.
References bind_cb(), bindService, discoveryPub, driverStatus, getApiService, getApiService_cb(), getDriverStatus_cb(), getDriverStatusService, getLightService_cb(), getLightsService, greenFlash, greenSolid, lbGetLightService, lbPub, lbSetLightService, lbStatusTopic, leftArrow, publishDriverStatus(), rightArrow, setLightService_cb(), setLightsService, sidesSolid, takedown, yellowDim, and yellowFlash.
Member Function Documentation
◆ bind_cb()
|
private |
Definition at line 70 of file MockLightBarDriver.cpp.
Referenced by MockLightBarDriver().

◆ getApiService_cb()
|
private |
Definition at line 76 of file MockLightBarDriver.cpp.
References getDriverApi().
Referenced by MockLightBarDriver().


◆ getDriverApi()
|
private |
Definition at line 137 of file MockLightBarDriver.cpp.
References lbGetLightService, lbSetLightService, and lbStatusTopic.
Referenced by getApiService_cb().

◆ getDriverStatus()
|
private |
Definition at line 119 of file MockLightBarDriver.cpp.
References driverStatus, and getNodeName().
Referenced by getDriverStatus_cb(), and publishDriverStatus().


◆ getDriverStatus_cb()
|
private |
Definition at line 64 of file MockLightBarDriver.cpp.
References getDriverStatus().
Referenced by MockLightBarDriver().


◆ getDriverTypesList()
| vector< string > mock_drivers::MockLightBarDriver::getDriverTypesList | ( | ) |
Definition at line 159 of file MockLightBarDriver.cpp.
◆ getLightBarStatus()
|
private |
Helper function to build the lightbar status message
- Returns
- The lightbar status message
Definition at line 105 of file MockLightBarDriver.cpp.
References greenFlash, greenSolid, leftArrow, rightArrow, sidesSolid, takedown, yellowDim, and yellowFlash.
Referenced by getLightService_cb(), and publishData().

◆ getLightService_cb()
|
private |
Definition at line 96 of file MockLightBarDriver.cpp.
References getLightBarStatus().
Referenced by MockLightBarDriver().


◆ getNodeName()
| string mock_drivers::MockLightBarDriver::getNodeName | ( | ) |
Definition at line 155 of file MockLightBarDriver.cpp.
Referenced by getDriverStatus().

◆ publishData()
| void mock_drivers::MockLightBarDriver::publishData | ( | ) |
Definition at line 146 of file MockLightBarDriver.cpp.
References getLightBarStatus(), and lbPub.
Referenced by main().


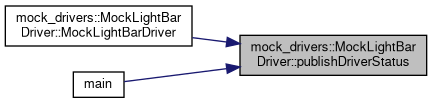
◆ publishDriverStatus()
| void mock_drivers::MockLightBarDriver::publishDriverStatus | ( | ) |
Definition at line 151 of file MockLightBarDriver.cpp.
References discoveryPub, and getDriverStatus().
Referenced by MockLightBarDriver(), and main().

◆ setLightService_cb()
|
private |
Definition at line 82 of file MockLightBarDriver.cpp.
References greenFlash, greenSolid, leftArrow, rightArrow, sidesSolid, takedown, yellowDim, and yellowFlash.
Referenced by MockLightBarDriver().

Member Data Documentation
◆ bindService
|
private |
Definition at line 61 of file MockLightBarDriver.hpp.
Referenced by MockLightBarDriver().
◆ discoveryPub
|
private |
Definition at line 55 of file MockLightBarDriver.hpp.
Referenced by MockLightBarDriver(), and publishDriverStatus().
◆ driverStatus
|
private |
Definition at line 51 of file MockLightBarDriver.hpp.
Referenced by MockLightBarDriver(), and getDriverStatus().
◆ EXPECTED_DATA_COL_COUNT
|
private |
Definition at line 65 of file MockLightBarDriver.hpp.
◆ getApiService
|
private |
Definition at line 60 of file MockLightBarDriver.hpp.
Referenced by MockLightBarDriver().
◆ getDriverStatusService
|
private |
Definition at line 62 of file MockLightBarDriver.hpp.
Referenced by MockLightBarDriver().
◆ getLightsService
|
private |
Definition at line 58 of file MockLightBarDriver.hpp.
Referenced by MockLightBarDriver().
◆ greenFlash
|
private |
Definition at line 69 of file MockLightBarDriver.hpp.
Referenced by MockLightBarDriver(), getLightBarStatus(), and setLightService_cb().
◆ greenSolid
|
private |
Definition at line 74 of file MockLightBarDriver.hpp.
Referenced by MockLightBarDriver(), getLightBarStatus(), and setLightService_cb().
◆ lbGetLightService
|
private |
Definition at line 63 of file MockLightBarDriver.hpp.
Referenced by MockLightBarDriver(), and getDriverApi().
◆ lbPub
|
private |
Definition at line 53 of file MockLightBarDriver.hpp.
Referenced by MockLightBarDriver(), and publishData().
◆ lbSetLightService
|
private |
Definition at line 64 of file MockLightBarDriver.hpp.
Referenced by MockLightBarDriver(), and getDriverApi().
◆ lbStatusTopic
|
private |
Definition at line 54 of file MockLightBarDriver.hpp.
Referenced by MockLightBarDriver(), and getDriverApi().
◆ leftArrow
|
private |
Definition at line 71 of file MockLightBarDriver.hpp.
Referenced by MockLightBarDriver(), getLightBarStatus(), and setLightService_cb().
◆ rightArrow
|
private |
Definition at line 72 of file MockLightBarDriver.hpp.
Referenced by MockLightBarDriver(), getLightBarStatus(), and setLightService_cb().
◆ SAMPLE_ID_IDX
|
private |
Definition at line 66 of file MockLightBarDriver.hpp.
◆ setLightsService
|
private |
Definition at line 59 of file MockLightBarDriver.hpp.
Referenced by MockLightBarDriver().
◆ sidesSolid
|
private |
Definition at line 73 of file MockLightBarDriver.hpp.
Referenced by MockLightBarDriver(), getLightBarStatus(), and setLightService_cb().
◆ takedown
|
private |
Definition at line 76 of file MockLightBarDriver.hpp.
Referenced by MockLightBarDriver(), getLightBarStatus(), and setLightService_cb().
◆ yellowDim
|
private |
Definition at line 75 of file MockLightBarDriver.hpp.
Referenced by MockLightBarDriver(), getLightBarStatus(), and setLightService_cb().
◆ yellowFlash
|
private |
Definition at line 70 of file MockLightBarDriver.hpp.
Referenced by MockLightBarDriver(), getLightBarStatus(), and setLightService_cb().
The documentation for this class was generated from the following files:
- mock_drivers/mock_lightbar_driver/include/mock_lightbar_driver/MockLightBarDriver.hpp
- mock_drivers/mock_lightbar_driver/src/MockLightBarDriver.cpp