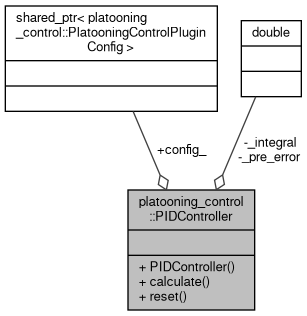
This class includes logic for PID controller. PID controller is used in this plugin to maintain the inter-vehicle gap by adjusting the speed. More...
#include <pid_controller.hpp>
Public Member Functions | |
| PIDController () | |
| Constructor for the PID controller class. More... | |
| double | calculate (double setpoint, double pv) |
| function to calculate control command based on setpoint and process vale More... | |
| void | reset () |
Public Attributes | |
| std::shared_ptr< PlatooningControlPluginConfig > | config_ = std::make_shared<PlatooningControlPluginConfig>() |
| plugin config object More... | |
Private Attributes | |
| double | _pre_error = 0.0 |
| double | _integral = 0.0 |
Detailed Description
This class includes logic for PID controller. PID controller is used in this plugin to maintain the inter-vehicle gap by adjusting the speed.
Definition at line 27 of file pid_controller.hpp.
Constructor & Destructor Documentation
◆ PIDController()
| platooning_control::PIDController::PIDController | ( | ) |
Member Function Documentation
◆ calculate()
| double platooning_control::PIDController::calculate | ( | double | setpoint, |
| double | pv | ||
| ) |
function to calculate control command based on setpoint and process vale
- Parameters
-
setpoint desired value pv current value
- Returns
- the manipulated variable given a setpoint and current process value
Definition at line 24 of file pid_controller.cpp.
References _integral, _pre_error, and config_.
Referenced by platooning_control::PlatooningControlWorker::generate_speed().

◆ reset()
| void platooning_control::PIDController::reset | ( | ) |
Definition at line 68 of file pid_controller.cpp.
References _integral, and _pre_error.
Referenced by platooning_control::PlatooningControlWorker::generate_speed().

Member Data Documentation
◆ _integral
|
private |
Definition at line 66 of file pid_controller.hpp.
Referenced by calculate(), and reset().
◆ _pre_error
|
private |
Definition at line 65 of file pid_controller.hpp.
Referenced by calculate(), and reset().
◆ config_
| std::shared_ptr<PlatooningControlPluginConfig> platooning_control::PIDController::config_ = std::make_shared<PlatooningControlPluginConfig>() |
The documentation for this class was generated from the following files:
- platooning_control/include/platooning_control/pid_controller.hpp
- platooning_control/src/pid_controller.cpp