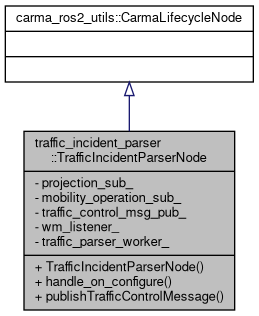
The class responsible for processing incoming MobilityOperation messages with strategy "carma3/Incident_Use_Case". More...
#include <traffic_incident_parser_node.hpp>
Public Member Functions | |
| TrafficIncidentParserNode (const rclcpp::NodeOptions &) | |
| TrafficIncidentParserNode constructor. More... | |
| carma_ros2_utils::CallbackReturn | handle_on_configure (const rclcpp_lifecycle::State &) |
| void | publishTrafficControlMessage (const carma_v2x_msgs::msg::TrafficControlMessage &traffic_control_msg) const |
| Publish traffic control message. More... | |
Private Attributes | |
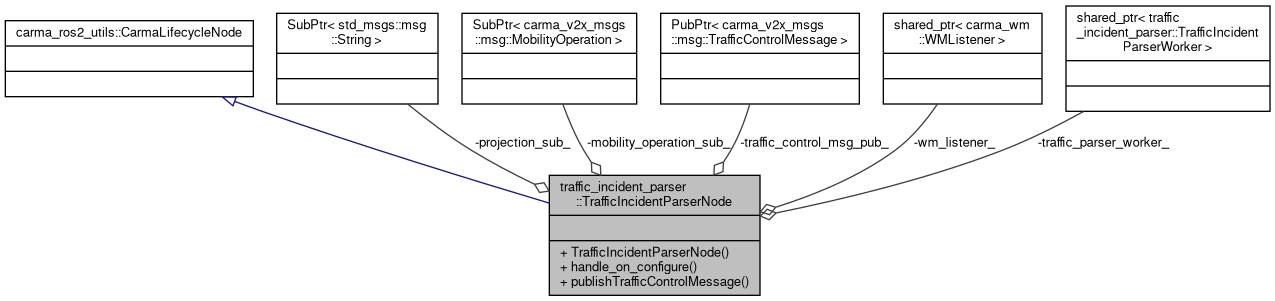
| carma_ros2_utils::SubPtr< std_msgs::msg::String > | projection_sub_ |
| carma_ros2_utils::SubPtr< carma_v2x_msgs::msg::MobilityOperation > | mobility_operation_sub_ |
| carma_ros2_utils::PubPtr< carma_v2x_msgs::msg::TrafficControlMessage > | traffic_control_msg_pub_ |
| std::shared_ptr< carma_wm::WMListener > | wm_listener_ |
| std::shared_ptr< TrafficIncidentParserWorker > | traffic_parser_worker_ |
Detailed Description
The class responsible for processing incoming MobilityOperation messages with strategy "carma3/Incident_Use_Case".
Definition at line 37 of file traffic_incident_parser_node.hpp.
Constructor & Destructor Documentation
◆ TrafficIncidentParserNode()
|
explicit |
TrafficIncidentParserNode constructor.
Definition at line 22 of file traffic_incident_parser_node.cpp.
Member Function Documentation
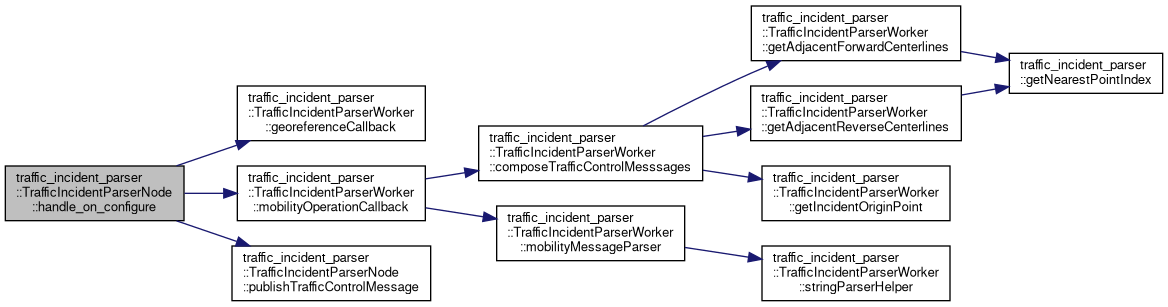
◆ handle_on_configure()
| carma_ros2_utils::CallbackReturn traffic_incident_parser::TrafficIncidentParserNode::handle_on_configure | ( | const rclcpp_lifecycle::State & | ) |
Definition at line 27 of file traffic_incident_parser_node.cpp.
References traffic_incident_parser::TrafficIncidentParserWorker::georeferenceCallback(), mobility_operation_sub_, traffic_incident_parser::TrafficIncidentParserWorker::mobilityOperationCallback(), projection_sub_, publishTrafficControlMessage(), traffic_control_msg_pub_, traffic_parser_worker_, and wm_listener_.
◆ publishTrafficControlMessage()
| void traffic_incident_parser::TrafficIncidentParserNode::publishTrafficControlMessage | ( | const carma_v2x_msgs::msg::TrafficControlMessage & | traffic_control_msg | ) | const |
Publish traffic control message.
Definition at line 60 of file traffic_incident_parser_node.cpp.
References traffic_control_msg_pub_.
Referenced by handle_on_configure().

Member Data Documentation
◆ mobility_operation_sub_
|
private |
Definition at line 43 of file traffic_incident_parser_node.hpp.
Referenced by handle_on_configure().
◆ projection_sub_
|
private |
Definition at line 42 of file traffic_incident_parser_node.hpp.
Referenced by handle_on_configure().
◆ traffic_control_msg_pub_
|
private |
Definition at line 46 of file traffic_incident_parser_node.hpp.
Referenced by handle_on_configure(), and publishTrafficControlMessage().
◆ traffic_parser_worker_
|
private |
Definition at line 52 of file traffic_incident_parser_node.hpp.
Referenced by handle_on_configure().
◆ wm_listener_
|
private |
Definition at line 49 of file traffic_incident_parser_node.hpp.
Referenced by handle_on_configure().
The documentation for this class was generated from the following files:
- traffic_incident_parser/include/traffic_incident_parser/traffic_incident_parser_node.hpp
- traffic_incident_parser/src/traffic_incident_parser_node.cpp