#include <traffic_incident_parser_worker.hpp>
Public Types | |
| using | PublishTrafficControlCallback = std::function< void(const carma_v2x_msgs::msg::TrafficControlMessage &)> |
Public Member Functions | |
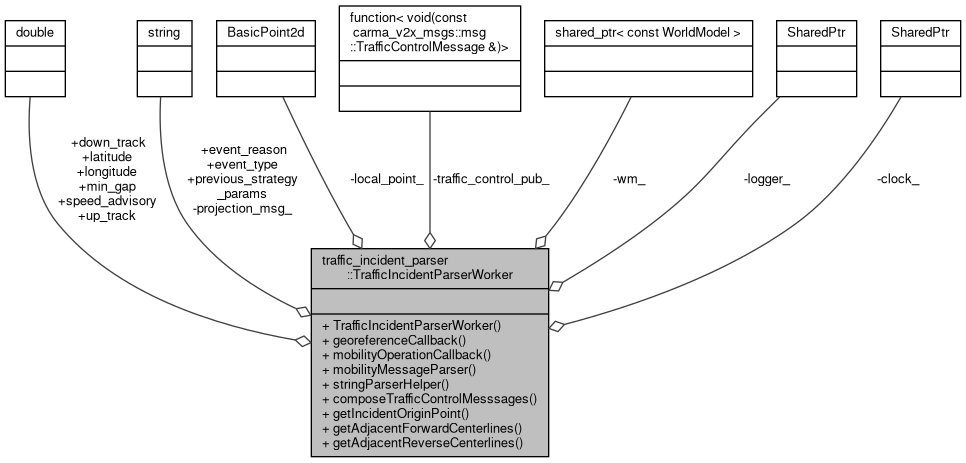
| TrafficIncidentParserWorker (carma_wm::WorldModelConstPtr wm, const PublishTrafficControlCallback &traffic_control_pub, rclcpp::node_interfaces::NodeLoggingInterface::SharedPtr logger, rclcpp::Clock::SharedPtr clock) | |
| TrafficIncidentParserWorker constructor. More... | |
| void | georeferenceCallback (std_msgs::msg::String::UniquePtr projection_msg) |
| Callback for the georeference subscriber used to set the map projection. More... | |
| void | mobilityOperationCallback (carma_v2x_msgs::msg::MobilityOperation::UniquePtr mobility_msg) |
| Function to receive the incoming mobility operation message from the message node and publish the geofence message upon processing the mobility msg. Only incoming mobility operation messages with strategy "carma3/Incident_Use_Case" are processed. More... | |
| bool | mobilityMessageParser (std::string mobility_strategy_params) |
| Function to help parse incoming mobility operation messages to required format. More... | |
| std::string | stringParserHelper (std::string str, unsigned long str_index) const |
| Function to help convert string to double data type. More... | |
| std::vector< carma_v2x_msgs::msg::TrafficControlMessageV01 > | composeTrafficControlMesssages () |
| Algorithm for extracting the closed lanelet from internally saved mobility message (or geofence) params and assigning it to a traffic contol message. Closed lanelets are represent by vector of points, where each point represents the geometric middle point of a closed lanelet. More... | |
| lanelet::BasicPoint2d | getIncidentOriginPoint () const |
| Function to convert internally saved incident origin point from lat/lon to local map frame. More... | |
| void | getAdjacentForwardCenterlines (const lanelet::ConstLanelets &adjacentSet, const lanelet::BasicPoint2d &start_point, double downtrack, std::vector< std::vector< lanelet::BasicPoint2d > > *forward_lanes) const |
| Helper method to compute the concatenated centerlines of the lanes in front of the emergency vehicle point. More... | |
| void | getAdjacentReverseCenterlines (const lanelet::ConstLanelets &adjacentSet, const lanelet::BasicPoint2d &start_point, double uptrack, std::vector< std::vector< lanelet::BasicPoint2d > > *reverse_lanes) const |
| Helper method that is identical to getAdjacentForwardCenterlines except it works in reverse using uptrack distance. More... | |
Public Attributes | |
| const double | MphToMetersPerSec = 0.44704 |
| double | latitude = 0.0 |
| double | longitude = 0.0 |
| double | down_track = 0.0 |
| double | up_track = 0.0 |
| double | min_gap = 0.0 |
| double | speed_advisory = 0.0 |
| std::string | event_reason = "" |
| std::string | event_type |
| std::string | previous_strategy_params ="" |
Private Attributes | |
| lanelet::BasicPoint2d | local_point_ |
| std::string | projection_msg_ |
| PublishTrafficControlCallback | traffic_control_pub_ |
| carma_wm::WorldModelConstPtr | wm_ |
| rclcpp::node_interfaces::NodeLoggingInterface::SharedPtr | logger_ |
| rclcpp::Clock::SharedPtr | clock_ |
Detailed Description
Definition at line 43 of file traffic_incident_parser_worker.hpp.
Member Typedef Documentation
◆ PublishTrafficControlCallback
| using traffic_incident_parser::TrafficIncidentParserWorker::PublishTrafficControlCallback = std::function<void(const carma_v2x_msgs::msg::TrafficControlMessage&)> |
Definition at line 48 of file traffic_incident_parser_worker.hpp.
Constructor & Destructor Documentation
◆ TrafficIncidentParserWorker()
| traffic_incident_parser::TrafficIncidentParserWorker::TrafficIncidentParserWorker | ( | carma_wm::WorldModelConstPtr | wm, |
| const PublishTrafficControlCallback & | traffic_control_pub, | ||
| rclcpp::node_interfaces::NodeLoggingInterface::SharedPtr | logger, | ||
| rclcpp::Clock::SharedPtr | clock | ||
| ) |
TrafficIncidentParserWorker constructor.
Definition at line 28 of file traffic_incident_parser_worker.cpp.
Member Function Documentation
◆ composeTrafficControlMesssages()
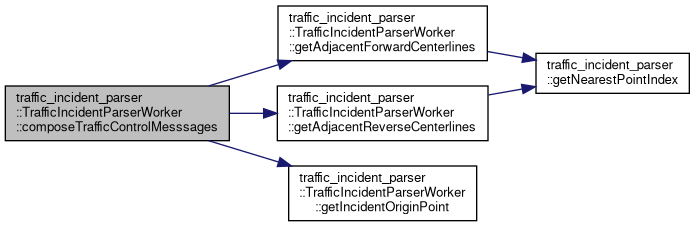
| std::vector< carma_v2x_msgs::msg::TrafficControlMessageV01 > traffic_incident_parser::TrafficIncidentParserWorker::composeTrafficControlMesssages | ( | ) |
Algorithm for extracting the closed lanelet from internally saved mobility message (or geofence) params and assigning it to a traffic contol message. Closed lanelets are represent by vector of points, where each point represents the geometric middle point of a closed lanelet.
- Returns
- A vector of traffic control messages; one for each closed lane.
Definition at line 292 of file traffic_incident_parser_worker.cpp.
References clock_, down_track, event_reason, getAdjacentForwardCenterlines(), getAdjacentReverseCenterlines(), getIncidentOriginPoint(), process_bag::i, local_point_, logger_, min_gap, projection_msg_, speed_advisory, up_track, and wm_.
Referenced by mobilityOperationCallback().

◆ georeferenceCallback()
| void traffic_incident_parser::TrafficIncidentParserWorker::georeferenceCallback | ( | std_msgs::msg::String::UniquePtr | projection_msg | ) |
Callback for the georeference subscriber used to set the map projection.
- Parameters
-
msg The latest georeference.
Definition at line 73 of file traffic_incident_parser_worker.cpp.
References projection_msg_.
Referenced by traffic_incident_parser::TrafficIncidentParserNode::handle_on_configure().

◆ getAdjacentForwardCenterlines()
| void traffic_incident_parser::TrafficIncidentParserWorker::getAdjacentForwardCenterlines | ( | const lanelet::ConstLanelets & | adjacentSet, |
| const lanelet::BasicPoint2d & | start_point, | ||
| double | downtrack, | ||
| std::vector< std::vector< lanelet::BasicPoint2d > > * | forward_lanes | ||
| ) | const |
Helper method to compute the concatenated centerlines of the lanes in front of the emergency vehicle point.
- Parameters
-
adjacentSet The set of adjacent lanes to start from start_point Point to start the downtrack calculation from. Should be the emergency vehicle points downtrack downtrack distance to grab centerline points from forward_lanes Ouput parameter which will be populated with the centerlines for each lane up to the downtrack distance
Definition at line 198 of file traffic_incident_parser_worker.cpp.
References traffic_incident_parser::getNearestPointIndex(), logger_, and wm_.
Referenced by composeTrafficControlMesssages().


◆ getAdjacentReverseCenterlines()
| void traffic_incident_parser::TrafficIncidentParserWorker::getAdjacentReverseCenterlines | ( | const lanelet::ConstLanelets & | adjacentSet, |
| const lanelet::BasicPoint2d & | start_point, | ||
| double | uptrack, | ||
| std::vector< std::vector< lanelet::BasicPoint2d > > * | reverse_lanes | ||
| ) | const |
Helper method that is identical to getAdjacentForwardCenterlines except it works in reverse using uptrack distance.
- Parameters
-
adjacentSet The set of adjacent lanes to start from start_point Point to start the downtrack calculation from. Should be the emergency vehicle points downtrack downtrack distance to grab centerline points from forward_lanes Ouput parameter which will be populated with the centerlines for each lane up to the downtrack distance
Definition at line 245 of file traffic_incident_parser_worker.cpp.
References traffic_incident_parser::getNearestPointIndex(), logger_, and wm_.
Referenced by composeTrafficControlMesssages().


◆ getIncidentOriginPoint()
| lanelet::BasicPoint2d traffic_incident_parser::TrafficIncidentParserWorker::getIncidentOriginPoint | ( | ) | const |
Function to convert internally saved incident origin point from lat/lon to local map frame.
- Returns
- The internally saved incident origin point within the local map frame.
Definition at line 164 of file traffic_incident_parser_worker.cpp.
References latitude, longitude, and projection_msg_.
Referenced by composeTrafficControlMesssages().

◆ mobilityMessageParser()
| bool traffic_incident_parser::TrafficIncidentParserWorker::mobilityMessageParser | ( | std::string | mobility_strategy_params | ) |
Function to help parse incoming mobility operation messages to required format.
- Parameters
-
mobility_strategy_params The strategy params associated with an incoming mobility operation message.
- Returns
- True if the new message is valid and can be used. False if not new or not valid.
Definition at line 79 of file traffic_incident_parser_worker.cpp.
References down_track, event_reason, event_type, latitude, logger_, longitude, min_gap, MphToMetersPerSec, speed_advisory, stringParserHelper(), and up_track.
Referenced by mobilityOperationCallback().


◆ mobilityOperationCallback()
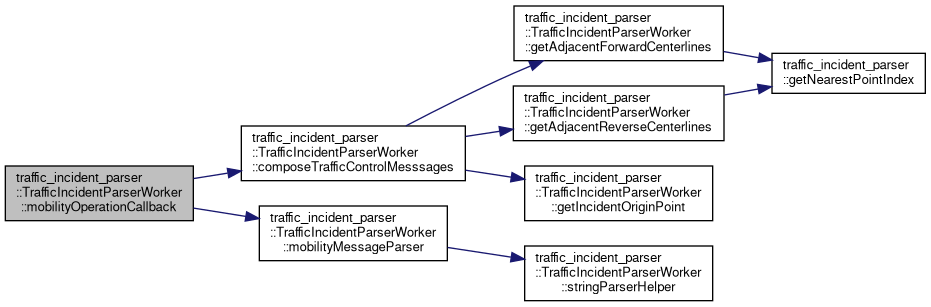
| void traffic_incident_parser::TrafficIncidentParserWorker::mobilityOperationCallback | ( | carma_v2x_msgs::msg::MobilityOperation::UniquePtr | mobility_msg | ) |
Function to receive the incoming mobility operation message from the message node and publish the geofence message upon processing the mobility msg. Only incoming mobility operation messages with strategy "carma3/Incident_Use_Case" are processed.
- Parameters
-
mobility_msg Incoming mobility operation message
Definition at line 32 of file traffic_incident_parser_worker.cpp.
References composeTrafficControlMesssages(), event_type, logger_, mobilityMessageParser(), previous_strategy_params, projection_msg_, traffic_control_pub_, and wm_.
Referenced by traffic_incident_parser::TrafficIncidentParserNode::handle_on_configure().

◆ stringParserHelper()
| std::string traffic_incident_parser::TrafficIncidentParserWorker::stringParserHelper | ( | std::string | str, |
| unsigned long | str_index | ||
| ) | const |
Function to help convert string to double data type.
- Parameters
-
str String object from which to extract the numeric value (a double). str_idx The String object's index to start looking at.
- Returns
- A string object containing only the numeric value included in the str object.
Definition at line 154 of file traffic_incident_parser_worker.cpp.
References process_bag::i, and create_two_lane_map::str.
Referenced by mobilityMessageParser().

Member Data Documentation
◆ clock_
|
private |
Definition at line 140 of file traffic_incident_parser_worker.hpp.
Referenced by composeTrafficControlMesssages().
◆ down_track
| double traffic_incident_parser::TrafficIncidentParserWorker::down_track = 0.0 |
Definition at line 122 of file traffic_incident_parser_worker.hpp.
Referenced by composeTrafficControlMesssages(), and mobilityMessageParser().
◆ event_reason
| std::string traffic_incident_parser::TrafficIncidentParserWorker::event_reason = "" |
Definition at line 126 of file traffic_incident_parser_worker.hpp.
Referenced by composeTrafficControlMesssages(), and mobilityMessageParser().
◆ event_type
| std::string traffic_incident_parser::TrafficIncidentParserWorker::event_type |
Definition at line 127 of file traffic_incident_parser_worker.hpp.
Referenced by mobilityMessageParser(), and mobilityOperationCallback().
◆ latitude
| double traffic_incident_parser::TrafficIncidentParserWorker::latitude = 0.0 |
Definition at line 120 of file traffic_incident_parser_worker.hpp.
Referenced by getIncidentOriginPoint(), and mobilityMessageParser().
◆ local_point_
|
private |
Definition at line 133 of file traffic_incident_parser_worker.hpp.
Referenced by composeTrafficControlMesssages().
◆ logger_
|
private |
Definition at line 138 of file traffic_incident_parser_worker.hpp.
Referenced by composeTrafficControlMesssages(), getAdjacentForwardCenterlines(), getAdjacentReverseCenterlines(), mobilityMessageParser(), and mobilityOperationCallback().
◆ longitude
| double traffic_incident_parser::TrafficIncidentParserWorker::longitude = 0.0 |
Definition at line 121 of file traffic_incident_parser_worker.hpp.
Referenced by getIncidentOriginPoint(), and mobilityMessageParser().
◆ min_gap
| double traffic_incident_parser::TrafficIncidentParserWorker::min_gap = 0.0 |
Definition at line 124 of file traffic_incident_parser_worker.hpp.
Referenced by composeTrafficControlMesssages(), and mobilityMessageParser().
◆ MphToMetersPerSec
| const double traffic_incident_parser::TrafficIncidentParserWorker::MphToMetersPerSec = 0.44704 |
Definition at line 49 of file traffic_incident_parser_worker.hpp.
Referenced by mobilityMessageParser().
◆ previous_strategy_params
| std::string traffic_incident_parser::TrafficIncidentParserWorker::previous_strategy_params ="" |
Definition at line 129 of file traffic_incident_parser_worker.hpp.
Referenced by mobilityOperationCallback().
◆ projection_msg_
|
private |
Definition at line 134 of file traffic_incident_parser_worker.hpp.
Referenced by composeTrafficControlMesssages(), georeferenceCallback(), getIncidentOriginPoint(), and mobilityOperationCallback().
◆ speed_advisory
| double traffic_incident_parser::TrafficIncidentParserWorker::speed_advisory = 0.0 |
Definition at line 125 of file traffic_incident_parser_worker.hpp.
Referenced by composeTrafficControlMesssages(), and mobilityMessageParser().
◆ traffic_control_pub_
|
private |
Definition at line 135 of file traffic_incident_parser_worker.hpp.
Referenced by mobilityOperationCallback().
◆ up_track
| double traffic_incident_parser::TrafficIncidentParserWorker::up_track = 0.0 |
Definition at line 123 of file traffic_incident_parser_worker.hpp.
Referenced by composeTrafficControlMesssages(), and mobilityMessageParser().
◆ wm_
|
private |
Definition at line 136 of file traffic_incident_parser_worker.hpp.
Referenced by composeTrafficControlMesssages(), getAdjacentForwardCenterlines(), getAdjacentReverseCenterlines(), and mobilityOperationCallback().
The documentation for this class was generated from the following files:
- traffic_incident_parser/include/traffic_incident_parser/traffic_incident_parser_worker.hpp
- traffic_incident_parser/src/traffic_incident_parser_worker.cpp