host_vehicle_filter_component.hpp File Reference
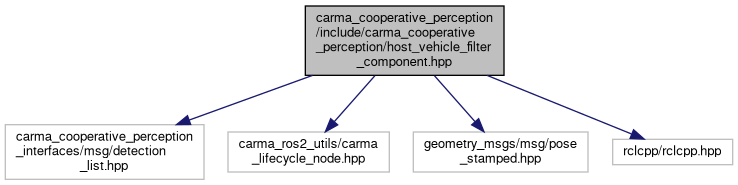
#include <carma_cooperative_perception_interfaces/msg/detection_list.hpp>#include <carma_ros2_utils/carma_lifecycle_node.hpp>#include <geometry_msgs/msg/pose_stamped.hpp>#include <rclcpp/rclcpp.hpp>
Include dependency graph for host_vehicle_filter_component.hpp:
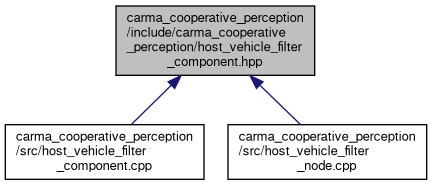
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | carma_cooperative_perception::HostVehicleFilterNode |
Namespaces | |
| namespace | carma_cooperative_perception |
Functions | |
| auto | carma_cooperative_perception::euclidean_distance_squared (const geometry_msgs::msg::Pose &a, const geometry_msgs::msg::Pose &b) -> double |