lookup_grid.hpp File Reference
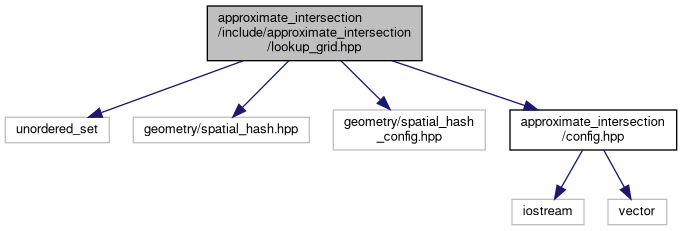
#include <unordered_set>#include <geometry/spatial_hash.hpp>#include <geometry/spatial_hash_config.hpp>#include "approximate_intersection/config.hpp"
Include dependency graph for lookup_grid.hpp:
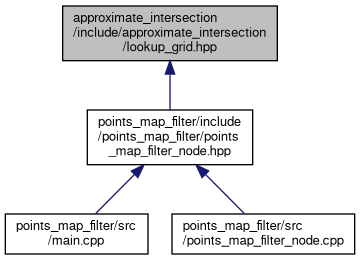
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | approximate_intersection::LookupGrid< PointT > |
| LookupGrid class implements a fast occupancy grid creation and intersection data structure. The user provides 2d min/max bounds on the grid as well as cell side length (cells are always square). The user can then add points into the grid. Cells which contain points are marked as occupied. Once the grid is populated, intersections can be checked against. If the queried point lands in an occupied cell the intersection is reported as true. More... | |
Namespaces | |
| namespace | approximate_intersection |