main.cpp File Reference
#include <ros/ros.h>#include <rosbag_mock_drivers/MockCameraDriver.h>#include <rosbag_mock_drivers/MockCANDriver.h>#include <rosbag_mock_drivers/MockCommsDriver.h>#include <rosbag_mock_drivers/MockControllerDriver.h>#include <rosbag_mock_drivers/MockGNSSDriver.h>#include <rosbag_mock_drivers/MockIMUDriver.h>#include <rosbag_mock_drivers/MockLidarDriver.h>#include <rosbag_mock_drivers/MockRadarDriver.h>#include <rosbag_mock_drivers/MockRoadwaySensorDriver.h>
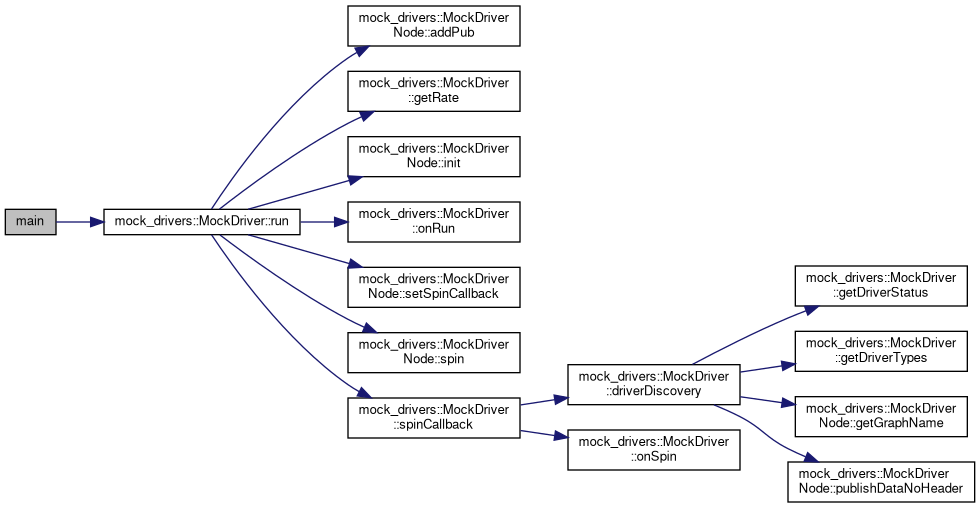
Include dependency graph for main.cpp:

Go to the source code of this file.
Functions | |
| int | main (int argc, char **argv) |
Function Documentation
◆ main()
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 29 of file main.cpp.
30{
31 ros::init(argc, argv, "mock_driver");
32
33 if (strcmp("camera", argv[1]) == 0)
34 {
35 mock_drivers::MockCameraDriver node;
36 node.run();
37 }
38
39 else if (strcmp("can", argv[1]) == 0)
40 {
41 mock_drivers::MockCANDriver node;
42 node.run();
43 }
44
45 else if (strcmp("comms", argv[1]) == 0)
46 {
47 mock_drivers::MockCommsDriver node;
48 node.run();
49 }
50
51 else if (strcmp("controller", argv[1]) == 0)
52 {
53 mock_drivers::MockControllerDriver node;
54 node.run();
55 }
56
57 else if (strcmp("gnss", argv[1]) == 0)
58 {
59 mock_drivers::MockGNSSDriver node;
60 node.run();
61 }
62
63 else if (strcmp("imu", argv[1]) == 0)
64 {
65 mock_drivers::MockIMUDriver node;
66 node.run();
67 }
68
69 else if (strcmp("lidar", argv[1]) == 0)
70 {
71 mock_drivers::MockLidarDriver node;
72 node.run();
73 }
74
75 else if (strcmp("radar", argv[1]) == 0)
76 {
77 mock_drivers::MockRadarDriver node;
78 node.run();
79 }
80
81 else if (strcmp("roadway_sensor", argv[1]) == 0)
82 {
84 node.run();
85 }
86
87 return 0;
88}
Mock CAN driver. Operates as a passthrough for bag data which updates the timestamps on received mess...
Definition: MockCANDriver.h:32
Mock camera driver. Operates as a passthrough for bag data which updates the timestamps on received m...
Definition: MockCameraDriver.h:28
Mock Comms driver. Operates as a passthrough for bag data which updates the timestamps on received me...
Definition: MockCommsDriver.h:26
Mock Controller driver. Implements controller service and feedback logic to support CARMA Platform Gu...
Definition: MockControllerDriver.h:28
int run()
A function to initialize the publishers and subsricers and start the node. In child classes,...
Definition: MockDriver.cpp:35
Mock GNSS driver. Operates as a passthrough for bag data which updates the timestamps on received mes...
Definition: MockGNSSDriver.h:26
Mock IMU driver. Operates as a passthrough for bag data which updates the timestamps on received mess...
Definition: MockIMUDriver.h:26
Mock Lidar driver. Operates as a passthrough for bag data which updates the timestamps on received me...
Definition: MockLidarDriver.h:27
Mock Radar driver. Operates as a passthrough for bag data which updates the timestamps on received me...
Definition: MockRadarDriver.h:27
Mock Roadway Sensor driver. Operates as a passthrough for bag data which updates the timestamps on re...
Definition: MockRoadwaySensorDriver.h:27
References mock_drivers::MockDriver::run().
Here is the call graph for this function: