#include <collision_detection.hpp>
Public Attributes | |
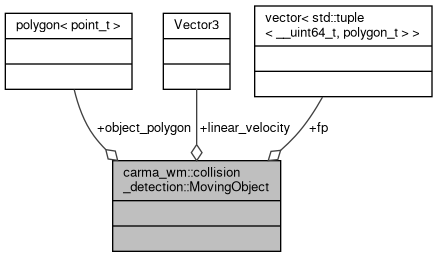
| polygon_t | object_polygon |
| geometry_msgs::msg::Vector3 | linear_velocity |
| std::vector< std::tuple< __uint64_t, polygon_t > > | fp |
Detailed Description
Definition at line 46 of file collision_detection.hpp.
Member Data Documentation
◆ fp
| std::vector<std::tuple <__uint64_t, polygon_t> > carma_wm::collision_detection::MovingObject::fp |
Definition at line 49 of file collision_detection.hpp.
Referenced by carma_wm::collision_detection::ConvertRoadwayObstacleToMovingObject(), carma_wm::collision_detection::ConvertVehicleToMovingObject(), and carma_wm::collision_detection::PredictObjectPosition().
◆ linear_velocity
| geometry_msgs::msg::Vector3 carma_wm::collision_detection::MovingObject::linear_velocity |
Definition at line 48 of file collision_detection.hpp.
Referenced by carma_wm::collision_detection::ConvertRoadwayObstacleToMovingObject(), carma_wm::collision_detection::ConvertVehicleToMovingObject(), and carma_wm::collision_detection::PredictObjectPosition().
◆ object_polygon
| polygon_t carma_wm::collision_detection::MovingObject::object_polygon |
Definition at line 47 of file collision_detection.hpp.
Referenced by carma_wm::collision_detection::CheckPolygonIntersection(), carma_wm::collision_detection::ConvertRoadwayObstacleToMovingObject(), and carma_wm::collision_detection::ConvertVehicleToMovingObject().
The documentation for this struct was generated from the following file:
- carma_wm/include/carma_wm/collision_detection.hpp