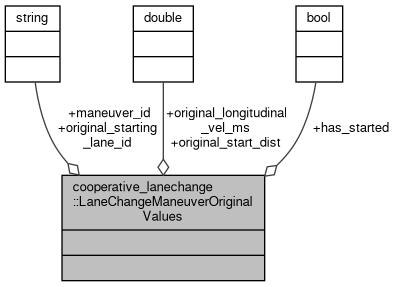
Convenience struct for storing the original start_dist and starting_lane_id associated with a received lane change maneuver. More...
#include <cooperative_lanechange_node.hpp>
Public Attributes | |
| std::string | maneuver_id |
| std::string | original_starting_lane_id |
| double | original_start_dist |
| double | original_longitudinal_vel_ms |
| bool | has_started = false |
Detailed Description
Convenience struct for storing the original start_dist and starting_lane_id associated with a received lane change maneuver.
Definition at line 54 of file cooperative_lanechange_node.hpp.
Member Data Documentation
◆ has_started
| bool cooperative_lanechange::LaneChangeManeuverOriginalValues::has_started = false |
Definition at line 60 of file cooperative_lanechange_node.hpp.
◆ maneuver_id
| std::string cooperative_lanechange::LaneChangeManeuverOriginalValues::maneuver_id |
Definition at line 56 of file cooperative_lanechange_node.hpp.
Referenced by cooperative_lanechange::CooperativeLaneChangePlugin::plan_trajectory_callback().
◆ original_longitudinal_vel_ms
| double cooperative_lanechange::LaneChangeManeuverOriginalValues::original_longitudinal_vel_ms |
Definition at line 59 of file cooperative_lanechange_node.hpp.
◆ original_start_dist
| double cooperative_lanechange::LaneChangeManeuverOriginalValues::original_start_dist |
Definition at line 58 of file cooperative_lanechange_node.hpp.
Referenced by cooperative_lanechange::CooperativeLaneChangePlugin::plan_trajectory_callback().
◆ original_starting_lane_id
| std::string cooperative_lanechange::LaneChangeManeuverOriginalValues::original_starting_lane_id |
Definition at line 57 of file cooperative_lanechange_node.hpp.
Referenced by cooperative_lanechange::CooperativeLaneChangePlugin::plan_trajectory_callback().
The documentation for this struct was generated from the following file:
- cooperative_lanechange/include/cooperative_lanechange/cooperative_lanechange_node.hpp