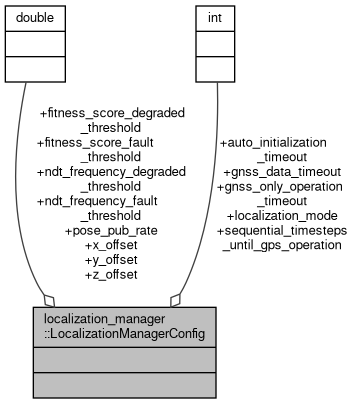
Struct to store the configuration settings for the LocalizationManager class. More...
#include <LocalizationManagerConfig.hpp>
Public Attributes | |
| double | fitness_score_degraded_threshold = 20.0 |
| NDT Fitness score above which the localization is considered in a degraded state. More... | |
| double | fitness_score_fault_threshold = 10000.0 |
| double | ndt_frequency_degraded_threshold = 8.0 |
| NDT solution frequency below which the localization is considered in a degraded state. More... | |
| double | ndt_frequency_fault_threshold = 0.66 |
| int | auto_initialization_timeout = 30000 |
| int | gnss_only_operation_timeout = 20000 |
| Timeout in ms for GNSS only operation. Ignored when in GNSS mode. More... | |
| int | sequential_timesteps_until_gps_operation = 5 |
| int | gnss_data_timeout = 500 |
| GNSS Data timeout. If exceeded the system will assume the GNSS is no longer functional. Units are ms. More... | |
| int | localization_mode = static_cast<int>(LocalizerMode::AUTO_WITHOUT_TIMEOUT) |
| Localization mode to use. More... | |
| double | pose_pub_rate = 10.0 |
| Selected pose publication rate. More... | |
| double | x_offset = 2.8 |
| GPS Offset to apply if that mode is enabled. More... | |
| double | y_offset = -2.1 |
| double | z_offset = 0.0 |
Friends | |
| std::ostream & | operator<< (std::ostream &output, const LocalizationManagerConfig &c) |
Detailed Description
Struct to store the configuration settings for the LocalizationManager class.
Definition at line 24 of file LocalizationManagerConfig.hpp.
Friends And Related Function Documentation
◆ operator<<
|
friend |
Definition at line 57 of file LocalizationManagerConfig.hpp.
Member Data Documentation
◆ auto_initialization_timeout
| int localization_manager::LocalizationManagerConfig::auto_initialization_timeout = 30000 |
Timeout in ms for auto initialization. If initialization cannot be completed in this time user action will be requested.
Definition at line 38 of file LocalizationManagerConfig.hpp.
Referenced by localization_manager::Node::Node(), localization_manager::Node::handle_on_configure(), localization_manager::Node::parameter_update_callback(), and localization_manager::LocalizationManager::stateTransitionCallback().
◆ fitness_score_degraded_threshold
| double localization_manager::LocalizationManagerConfig::fitness_score_degraded_threshold = 20.0 |
NDT Fitness score above which the localization is considered in a degraded state.
Definition at line 27 of file LocalizationManagerConfig.hpp.
Referenced by localization_manager::Node::Node(), localization_manager::Node::handle_on_configure(), localization_manager::Node::parameter_update_callback(), and localization_manager::LocalizationManager::poseAndStatsCallback().
◆ fitness_score_fault_threshold
| double localization_manager::LocalizationManagerConfig::fitness_score_fault_threshold = 10000.0 |
NDT Fitness score above which the localization is considered in a fault state and NDT matching can no longer be used.
Definition at line 30 of file LocalizationManagerConfig.hpp.
Referenced by localization_manager::Node::Node(), localization_manager::Node::handle_on_configure(), localization_manager::Node::parameter_update_callback(), and localization_manager::LocalizationManager::poseAndStatsCallback().
◆ gnss_data_timeout
| int localization_manager::LocalizationManagerConfig::gnss_data_timeout = 500 |
GNSS Data timeout. If exceeded the system will assume the GNSS is no longer functional. Units are ms.
Definition at line 45 of file LocalizationManagerConfig.hpp.
Referenced by localization_manager::Node::Node(), localization_manager::Node::handle_on_configure(), localization_manager::Node::parameter_update_callback(), and localization_manager::LocalizationManager::posePubTick().
◆ gnss_only_operation_timeout
| int localization_manager::LocalizationManagerConfig::gnss_only_operation_timeout = 20000 |
Timeout in ms for GNSS only operation. Ignored when in GNSS mode.
Definition at line 40 of file LocalizationManagerConfig.hpp.
Referenced by localization_manager::Node::Node(), localization_manager::Node::handle_on_configure(), localization_manager::Node::parameter_update_callback(), and localization_manager::LocalizationManager::stateTransitionCallback().
◆ localization_mode
| int localization_manager::LocalizationManagerConfig::localization_mode = static_cast<int>(LocalizerMode::AUTO_WITHOUT_TIMEOUT) |
Localization mode to use.
Definition at line 47 of file LocalizationManagerConfig.hpp.
Referenced by localization_manager::Node::Node(), localization_manager::Node::handle_on_configure(), localization_manager::LocalizationManager::poseAndStatsCallback(), and localization_manager::LocalizationManager::posePubTick().
◆ ndt_frequency_degraded_threshold
| double localization_manager::LocalizationManagerConfig::ndt_frequency_degraded_threshold = 8.0 |
NDT solution frequency below which the localization is considered in a degraded state.
Definition at line 32 of file LocalizationManagerConfig.hpp.
Referenced by localization_manager::Node::Node(), localization_manager::LocalizationManager::computeNDTFreq(), localization_manager::Node::handle_on_configure(), localization_manager::Node::parameter_update_callback(), localization_manager::LocalizationManager::poseAndStatsCallback(), and localization_manager::LocalizationManager::posePubTick().
◆ ndt_frequency_fault_threshold
| double localization_manager::LocalizationManagerConfig::ndt_frequency_fault_threshold = 0.66 |
NDT solution frequency below which the localization is considered in a fault state and NDT matching can no longer be used.
Definition at line 35 of file LocalizationManagerConfig.hpp.
Referenced by localization_manager::Node::Node(), localization_manager::LocalizationManager::computeNDTFreq(), localization_manager::Node::handle_on_configure(), localization_manager::Node::parameter_update_callback(), localization_manager::LocalizationManager::poseAndStatsCallback(), and localization_manager::LocalizationManager::posePubTick().
◆ pose_pub_rate
| double localization_manager::LocalizationManagerConfig::pose_pub_rate = 10.0 |
Selected pose publication rate.
Definition at line 49 of file LocalizationManagerConfig.hpp.
Referenced by localization_manager::Node::Node(), localization_manager::Node::handle_on_configure(), and localization_manager::Node::parameter_update_callback().
◆ sequential_timesteps_until_gps_operation
| int localization_manager::LocalizationManagerConfig::sequential_timesteps_until_gps_operation = 5 |
Integer: Maximum allowed number of sequential timesteps to let lidar initialize before switching to GPS only mode NOTE: Only used in GNSS only with NDT initialization mode
Definition at line 43 of file LocalizationManagerConfig.hpp.
Referenced by localization_manager::Node::Node(), localization_manager::Node::handle_on_configure(), localization_manager::Node::parameter_update_callback(), and localization_manager::LocalizationManager::poseAndStatsCallback().
◆ x_offset
| double localization_manager::LocalizationManagerConfig::x_offset = 2.8 |
GPS Offset to apply if that mode is enabled.
Definition at line 51 of file LocalizationManagerConfig.hpp.
Referenced by localization_manager::Node::Node(), localization_manager::Node::handle_on_configure(), localization_manager::Node::parameter_update_callback(), and localization_manager::LocalizationManager::posePubTick().
◆ y_offset
| double localization_manager::LocalizationManagerConfig::y_offset = -2.1 |
◆ z_offset
| double localization_manager::LocalizationManagerConfig::z_offset = 0.0 |
The documentation for this struct was generated from the following file:
- localization_manager/include/localization_manager/LocalizationManagerConfig.hpp