Platoon Leader Struct. More...
#include <platooning_control_worker.hpp>
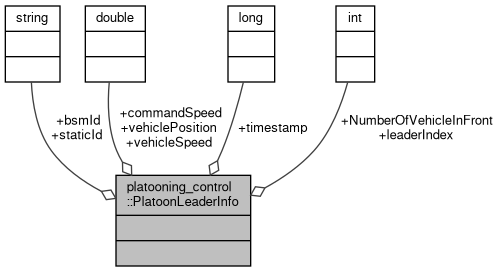
Public Attributes | |
| std::string | staticId |
| std::string | bsmId |
| double | commandSpeed |
| double | vehicleSpeed |
| double | vehiclePosition |
| long | timestamp |
| int | leaderIndex |
| int | NumberOfVehicleInFront |
Detailed Description
Platoon Leader Struct.
Definition at line 35 of file platooning_control_worker.hpp.
Member Data Documentation
◆ bsmId
| std::string platooning_control::PlatoonLeaderInfo::bsmId |
Definition at line 39 of file platooning_control_worker.hpp.
◆ commandSpeed
| double platooning_control::PlatoonLeaderInfo::commandSpeed |
Definition at line 41 of file platooning_control_worker.hpp.
Referenced by platooning_control::PlatooningControlWorker::generate_speed(), and platooning_control::PlatooningControlPlugin::platoon_info_cb().
◆ leaderIndex
| int platooning_control::PlatoonLeaderInfo::leaderIndex |
Definition at line 49 of file platooning_control_worker.hpp.
Referenced by platooning_control::PlatooningControlPlugin::platoon_info_cb().
◆ NumberOfVehicleInFront
| int platooning_control::PlatoonLeaderInfo::NumberOfVehicleInFront |
Definition at line 51 of file platooning_control_worker.hpp.
Referenced by platooning_control::PlatooningControlPlugin::platoon_info_cb().
◆ staticId
| std::string platooning_control::PlatoonLeaderInfo::staticId |
Definition at line 37 of file platooning_control_worker.hpp.
Referenced by platooning_control::PlatooningControlWorker::generate_speed(), and platooning_control::PlatooningControlPlugin::platoon_info_cb().
◆ timestamp
| long platooning_control::PlatoonLeaderInfo::timestamp |
Definition at line 47 of file platooning_control_worker.hpp.
◆ vehiclePosition
| double platooning_control::PlatoonLeaderInfo::vehiclePosition |
Definition at line 45 of file platooning_control_worker.hpp.
Referenced by platooning_control::PlatooningControlWorker::generate_speed(), and platooning_control::PlatooningControlPlugin::platoon_info_cb().
◆ vehicleSpeed
| double platooning_control::PlatoonLeaderInfo::vehicleSpeed |
Definition at line 43 of file platooning_control_worker.hpp.
The documentation for this struct was generated from the following file:
- platooning_control/include/platooning_control/platooning_control_worker.hpp