CARMAWorldModel.hpp File Reference
#include <rclcpp/rclcpp.hpp>#include "carma_wm/WorldModel.hpp"#include <lanelet2_extension/traffic_rules/CarmaUSTrafficRules.h>#include <lanelet2_core/primitives/BasicRegulatoryElements.h>#include <lanelet2_core/primitives/LineString.h>#include "carma_wm/IndexedDistanceMap.hpp"#include <carma_perception_msgs/msg/roadway_obstacle.hpp>#include <carma_perception_msgs/msg/roadway_obstacle_list.hpp>#include <carma_perception_msgs/msg/external_object.hpp>#include <carma_perception_msgs/msg/external_object_list.hpp>#include "carma_wm/TrackPos.hpp"#include "carma_wm/WorldModelUtils.hpp"#include <lanelet2_extension/time/TimeConversion.h>#include "boost/date_time/posix_time/posix_time.hpp"#include "carma_wm/SignalizedIntersectionManager.hpp"#include <rosgraph_msgs/msg/clock.hpp>#include <gtest/gtest_prod.h>
Include dependency graph for CARMAWorldModel.hpp:

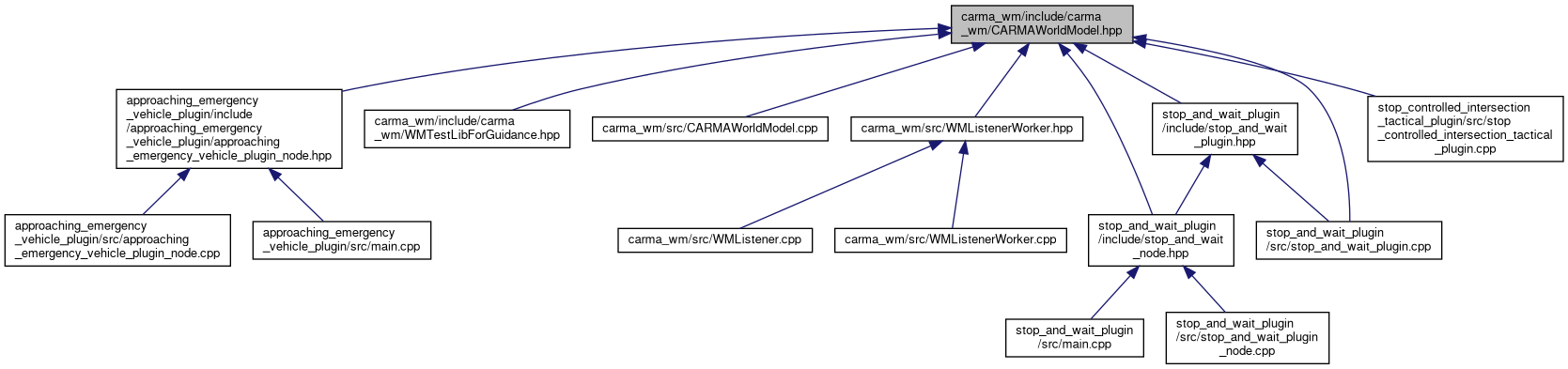
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | carma_wm::CARMAWorldModel |
| Class which implements the WorldModel interface. In addition this class provides write access to the world model. Write access is achieved through setters for the Map and Route and getMutableMap(). NOTE: This class should NOT be used in runtime code by users and is exposed solely for use in unit tests where the WMListener class cannot be instantiated. More... | |
Namespaces | |
| namespace | carma_wm |