Geofence.hpp File Reference
#include <lanelet2_core/primitives/Point.h>#include "GeofenceSchedule.hpp"#include <lanelet2_core/LaneletMap.h>#include <lanelet2_core/primitives/BasicRegulatoryElements.h>#include <lanelet2_core/primitives/Lanelet.h>#include <lanelet2_core/primitives/RegulatoryElement.h>#include <lanelet2_core/primitives/LaneletOrArea.h>#include <lanelet2_extension/regulatory_elements/DigitalSpeedLimit.h>#include <lanelet2_extension/regulatory_elements/DigitalMinimumGap.h>#include <lanelet2_extension/regulatory_elements/PassingControlLine.h>#include <boost/uuid/uuid.hpp>#include <boost/uuid/uuid_io.hpp>#include <boost/uuid/uuid_generators.hpp>#include <carma_v2x_msgs/msg/traffic_control_message.hpp>#include <carma_v2x_msgs/msg/map_data.hpp>
Include dependency graph for Geofence.hpp:

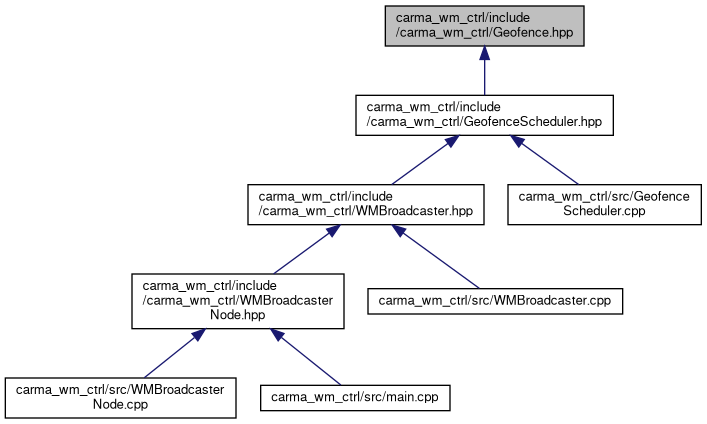
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | carma_wm_ctrl::Geofence |
| An object representing a geofence use for communications with CARMA Cloud. More... | |
Namespaces | |
| namespace | carma_wm_ctrl |
Variables | |
| const std::string | carma_wm_ctrl::MAP_MSG_INTERSECTION = "MAP_MSG_INTERSECTION" |
| const std::string | carma_wm_ctrl::MAP_MSG_TF_SIGNAL = "MAP_MSG_TF_SIGNAL" |