LocalizationTypes.hpp File Reference
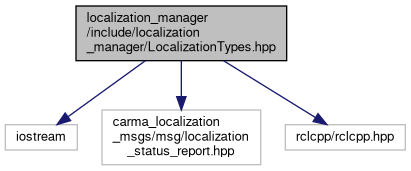
#include <iostream>#include <carma_localization_msgs/msg/localization_status_report.hpp>#include <rclcpp/rclcpp.hpp>
Include dependency graph for LocalizationTypes.hpp:
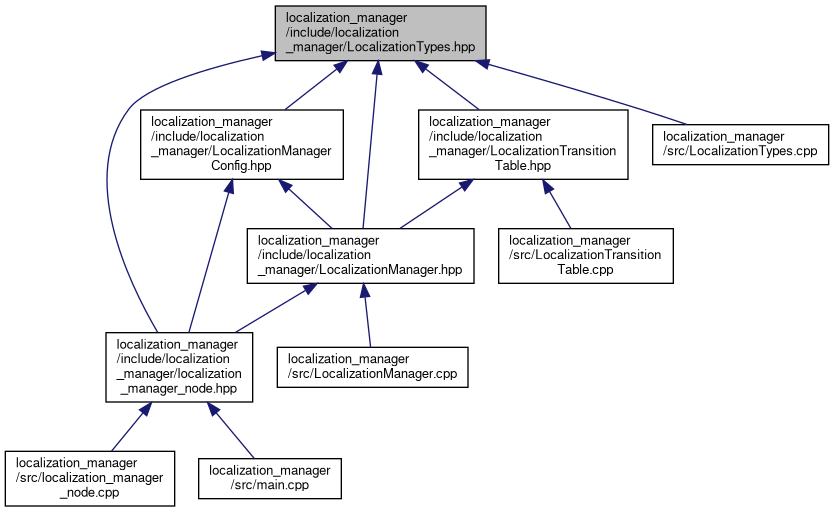
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | localization_manager |
Functions | |
| std::ostream & | localization_manager::operator<< (std::ostream &os, LocalizerMode m) |
| Stream operator for LocalizerMode enum. More... | |
| std::ostream & | localization_manager::operator<< (std::ostream &os, LocalizationState s) |
| Stream operator for LocalizationState enum. More... | |
| carma_localization_msgs::msg::LocalizationStatusReport | localization_manager::stateToMsg (LocalizationState state, const rclcpp::Time &stamp) |
| Helper function to convert LocalizationState objects into LocalizationStatusReport ROS messages. More... | |
| std::ostream & | localization_manager::operator<< (std::ostream &os, LocalizationSignal s) |
| Stream operator for LocalizationSignal enum. More... | |