MockDriverNode.h File Reference
#include <ros/ros.h>#include <carma_utils/CARMAUtils.h>#include "comm_types.h"#include "ROSComms.h"#include <vector>
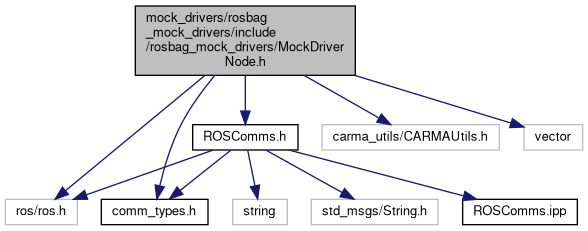
Include dependency graph for MockDriverNode.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | mock_drivers::PublisherWapper |
| Wrapper for publishers which allow their base topic name to be extracted. More... | |
| class | mock_drivers::MockDriverNode |
| Node class which connects to the ROS network. More... | |
Namespaces | |
| namespace | mock_drivers |