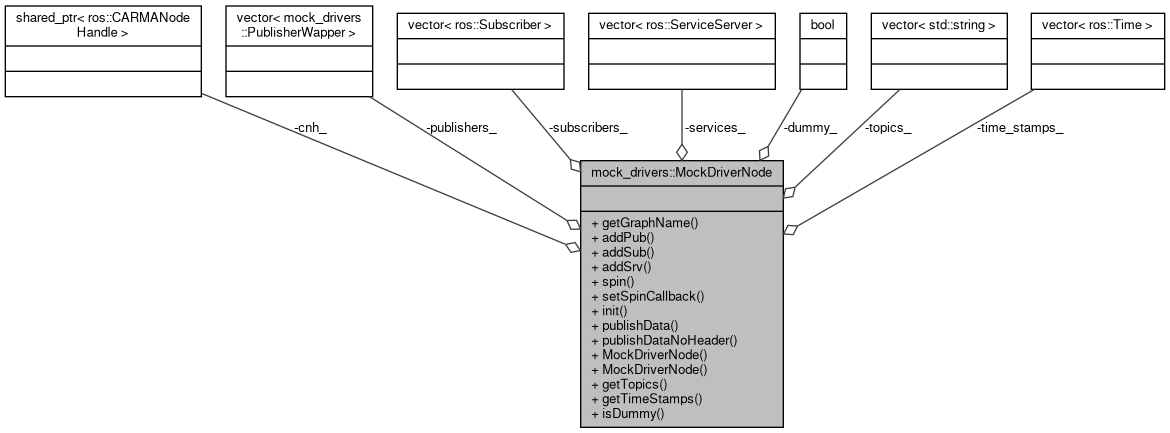
Node class which connects to the ROS network. More...
#include <MockDriverNode.h>
Public Member Functions | |
| std::string | getGraphName () const |
| Returns the fully qualified name of this node in the ROS network graph. More... | |
| template<typename T > | |
| void | addPub (T comm) |
| Function to add a publisher from a ROSComms object. More... | |
| template<typename T > | |
| void | addSub (T comm) |
| Function to add a subscriber from a ROSComms object. More... | |
| template<typename T > | |
| void | addSrv (T comm) |
| Function to add a service from a ROSComms object. More... | |
| void | spin (double rate) const |
| Begin the ros node. More... | |
| void | setSpinCallback (std::function< bool()> cb) const |
| Set the spin callback for the ros node. More... | |
| void | init () |
| Initialize the CARMA Node Handle pointer for the MockDriverNode (must be called before spin) More... | |
| template<typename T > | |
| void | publishData (std::string topic, T msg) |
| Publish data on a desired topic. More... | |
| template<typename T > | |
| void | publishDataNoHeader (std::string topic, T msg) |
| Publish data with no header on a desired topic. More... | |
| MockDriverNode () | |
| MockDriverNode (bool dummy) | |
| std::vector< std::string > | getTopics () |
| Returns a vector of all the topics that the node would publish to (only when it is a dummy node). Used for testing. More... | |
| std::vector< ros::Time > | getTimeStamps () |
| Returns a vector of all the time stamps of the data that would be published (only when it is a dummy node). Used for testing. More... | |
| bool | isDummy () |
| Returns if the node is a dummy node. Used for testing. More... | |
Private Attributes | |
| boost::shared_ptr< ros::CARMANodeHandle > | cnh_ |
| std::vector< PublisherWapper > | publishers_ |
| std::vector< ros::Subscriber > | subscribers_ |
| std::vector< ros::ServiceServer > | services_ |
| bool | dummy_ = false |
| std::vector< std::string > | topics_ |
| std::vector< ros::Time > | time_stamps_ |
Detailed Description
Node class which connects to the ROS network.
Definition at line 34 of file MockDriverNode.h.
Constructor & Destructor Documentation
◆ MockDriverNode() [1/2]
| mock_drivers::MockDriverNode::MockDriverNode | ( | ) |
Definition at line 21 of file MockDriverNode.cpp.
◆ MockDriverNode() [2/2]
| mock_drivers::MockDriverNode::MockDriverNode | ( | bool | dummy | ) |
Definition at line 24 of file MockDriverNode.cpp.
Member Function Documentation
◆ addPub()
|
inline |
Function to add a publisher from a ROSComms object.
Definition at line 59 of file MockDriverNode.h.
References cnh_, dummy_, pub, and publishers_.
Referenced by mock_drivers::MockControllerDriver::onRun(), and mock_drivers::MockDriver::run().

◆ addSrv()
|
inline |
Function to add a service from a ROSComms object.
Definition at line 83 of file MockDriverNode.h.
References callback(), cnh_, dummy_, and services_.
Referenced by mock_drivers::MockControllerDriver::onRun().


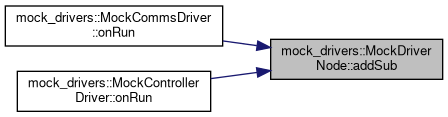
◆ addSub()
|
inline |
Function to add a subscriber from a ROSComms object.
Definition at line 72 of file MockDriverNode.h.
References callback(), cnh_, dummy_, and subscribers_.
Referenced by mock_drivers::MockCommsDriver::onRun(), and mock_drivers::MockControllerDriver::onRun().

◆ getGraphName()
| std::string mock_drivers::MockDriverNode::getGraphName | ( | ) | const |
Returns the fully qualified name of this node in the ROS network graph.
- Returns
- The fully specified name
Definition at line 28 of file MockDriverNode.cpp.
References dummy_.
Referenced by mock_drivers::MockDriver::driverDiscovery().

◆ getTimeStamps()
|
inline |
Returns a vector of all the time stamps of the data that would be published (only when it is a dummy node). Used for testing.
Definition at line 159 of file MockDriverNode.h.
References time_stamps_.
◆ getTopics()
|
inline |
Returns a vector of all the topics that the node would publish to (only when it is a dummy node). Used for testing.
Definition at line 153 of file MockDriverNode.h.
References topics_.
◆ init()
| void mock_drivers::MockDriverNode::init | ( | ) |
Initialize the CARMA Node Handle pointer for the MockDriverNode (must be called before spin)
Definition at line 56 of file MockDriverNode.cpp.
Referenced by mock_drivers::MockDriver::run().

◆ isDummy()
|
inline |
Returns if the node is a dummy node. Used for testing.
Definition at line 164 of file MockDriverNode.h.
References dummy_.
◆ publishData()
|
inline |
Publish data on a desired topic.
This function must take in the full name of topic that will be published including the namespaces and leading /. This can probably be made to take that information in on construction of the node but we can add that once it breaks :)
Definition at line 108 of file MockDriverNode.h.
References dummy_, pub, publishers_, time_stamps_, and topics_.
◆ publishDataNoHeader()
|
inline |
Publish data with no header on a desired topic.
Same as the publishData function, except this is used when the data doesn't have a header. This exists to allow for testing of the code. This can be combined with publishData once we are in c++ 17 and can use constexpr if statement.
Definition at line 132 of file MockDriverNode.h.
References dummy_, pub, publishers_, and topics_.
Referenced by mock_drivers::MockDriver::driverDiscovery(), and mock_drivers::MockControllerDriver::onSpin().

◆ setSpinCallback()
| void mock_drivers::MockDriverNode::setSpinCallback | ( | std::function< bool()> | cb | ) | const |
Set the spin callback for the ros node.
Definition at line 47 of file MockDriverNode.cpp.
References dummy_.
Referenced by mock_drivers::MockDriver::run().

◆ spin()
| void mock_drivers::MockDriverNode::spin | ( | double | rate | ) | const |
Begin the ros node.
Definition at line 38 of file MockDriverNode.cpp.
References dummy_.
Referenced by mock_drivers::MockDriver::run().

Member Data Documentation
◆ cnh_
|
private |
◆ dummy_
|
private |
Definition at line 43 of file MockDriverNode.h.
Referenced by addPub(), addSrv(), addSub(), getGraphName(), init(), isDummy(), publishData(), publishDataNoHeader(), setSpinCallback(), and spin().
◆ publishers_
|
private |
Definition at line 38 of file MockDriverNode.h.
Referenced by addPub(), publishData(), and publishDataNoHeader().
◆ services_
|
private |
Definition at line 40 of file MockDriverNode.h.
Referenced by addSrv().
◆ subscribers_
|
private |
Definition at line 39 of file MockDriverNode.h.
Referenced by addSub().
◆ time_stamps_
|
private |
Definition at line 46 of file MockDriverNode.h.
Referenced by getTimeStamps(), and publishData().
◆ topics_
|
private |
Definition at line 45 of file MockDriverNode.h.
Referenced by getTopics(), publishData(), and publishDataNoHeader().
The documentation for this class was generated from the following files:
- mock_drivers/rosbag_mock_drivers/include/rosbag_mock_drivers/MockDriverNode.h
- mock_drivers/rosbag_mock_drivers/src/MockDriverNode.cpp