log.hpp File Reference
Include dependency graph for log.hpp:

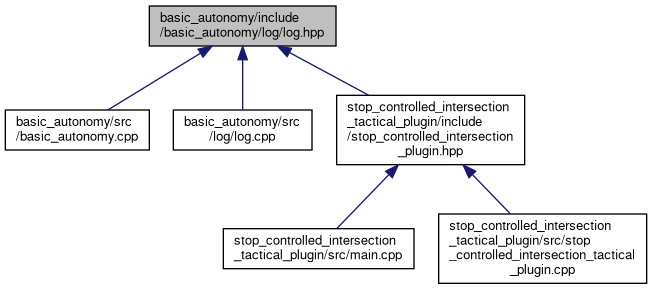
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | basic_autonomy |
| namespace | basic_autonomy::log |
Functions | |
| std::string | basic_autonomy::log::basicPointToStream (lanelet::BasicPoint2d point) |
| Helper function to convert a lanelet::BasicPoint2d to a string. More... | |
| std::string | basic_autonomy::log::pointSpeedPairToStream (waypoint_generation::PointSpeedPair point) |
| Helper function to convert a PointSpeedPair to a string. More... | |
| template<class T > | |
| void | basic_autonomy::log::printDebugPerLine (const std::vector< T > &values, std::function< std::string(T)> func) |
| Print a RCLCPP_DEBUG_STREAM for each value in values where the printed value is a string returned by func. More... | |
| template<class T > | |
| void | basic_autonomy::log::printDebugPerLine (const std::vector< T > &values, std::string(*free_func)(T)) |
| Print a RCLCPP_DEBUG_STREAM for each value in values where the printed value is a string returned by free_func. More... | |
| void | basic_autonomy::log::printDoublesPerLineWithPrefix (const std::string &prefix, const std::vector< double > &values) |
| Print a RCLCPP_DEBUG_STREAM for each value in values where the printed value is << prefix << value. More... | |
Variables | |
| static const std::string | basic_autonomy::BASIC_AUTONOMY_LOGGER = "basic_autonomy" |