#include <arbitrator_state_machine.hpp>
Public Member Functions | |
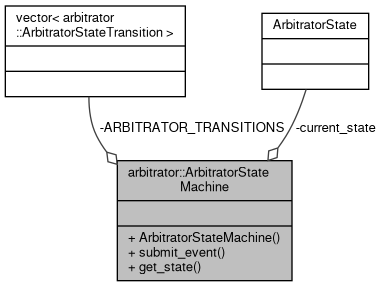
| ArbitratorStateMachine () | |
| ArbitratorState | submit_event (ArbitratorEvent event) |
| ArbitratorState | get_state () |
Private Attributes | |
| const std::vector< ArbitratorStateTransition > | ARBITRATOR_TRANSITIONS |
| ArbitratorState | current_state |
Detailed Description
The ArbitratorStateMachine class is responsible for regulating the state transitions within the Arbitrator node. It processess events and correlates them against a list of legal transitions to generate the next state the Arbitrator will take. The transition list is defined internally and each transition must be unique/deterministic (each state/event pair must transition to one-and-only-one other state) or behavior is undefined.
Definition at line 74 of file arbitrator_state_machine.hpp.
Constructor & Destructor Documentation
◆ ArbitratorStateMachine()
|
inline |
Definition at line 77 of file arbitrator_state_machine.hpp.
Member Function Documentation
◆ get_state()
| ArbitratorState arbitrator::ArbitratorStateMachine::get_state | ( | ) |
Get the current state of the Arbitrator
- Returns
- The state of the Arbitrator
Definition at line 23 of file arbitrator_state_machine.cpp.
References current_state.
◆ submit_event()
| ArbitratorState arbitrator::ArbitratorStateMachine::submit_event | ( | ArbitratorEvent | event | ) |
Submit an event for evaluation by the Arbitrator state machine.
- Parameters
-
The event to process
- Returns
- The state of the Arbitrator after the event has been processed.
Definition at line 29 of file arbitrator_state_machine.cpp.
References ARBITRATOR_TRANSITIONS, and current_state.
Member Data Documentation
◆ ARBITRATOR_TRANSITIONS
|
private |
Private, fixed state transition table
Definition at line 96 of file arbitrator_state_machine.hpp.
Referenced by submit_event().
◆ current_state
|
private |
Definition at line 115 of file arbitrator_state_machine.hpp.
Referenced by get_state(), and submit_event().
The documentation for this class was generated from the following files:
- arbitrator/include/arbitrator_state_machine.hpp
- arbitrator/src/arbitrator_state_machine.cpp